
Abstract
How do people automatize their dual-task performance through bottleneck bypassing (i.e., accomplish parallel processing of the central stages of two tasks)? In the present work we addressed this question, evaluating the impact of sensory–motor modality compatibility—the similarity in modality between the stimulus and the consequences of the response. We hypothesized that incompatible sensory–motor modalities (e.g., visual–vocal) create conflicts within modality-specific working memory subsystems, and therefore predicted that tasks producing such conflicts would be performed less automatically after practice. To probe for automaticity, we used a transfer psychological refractory period (PRP) procedure: Participants were first trained on a visual task (Exp. 1) or an auditory task (Exp. 2) by itself, which was later presented as Task 2, along with an unpracticed Task 1. The Task 1–Task 2 sensory–motor modality pairings were either compatible (visual–manual and auditory–vocal) or incompatible (visual–vocal and auditory–manual). In both experiments we found converging indicators of bottleneck bypassing (small dual-task interference and a high rate of response reversals) for compatible sensory–motor modalities, but indicators of bottlenecking (large dual-task interference and few response reversals) for incompatible sensory–motor modalities. Relatedly, the proportion of individuals able to bypass the bottleneck was high for compatible modalities but very low for incompatible modalities. We propose that dual-task automatization is within reach when the tasks rely on codes that do not compete within a working memory subsystem.
Similar content being viewed by others

People often experience difficulty when performing two tasks at the same time. This difficulty has been studied by cognitive psychologists for more than a century, starting as early as 1887 with the introspective work by Paulhan. There is now substantial evidence that the human mind has a severely limited capacity to select distinct actions at the same time, often resulting in a cognitive-processing bottleneck (Pashler, 1994; Welford, 1952). However, casual observation suggests that this central bottleneck can sometimes be bypassed, allowing two responses to be selected in parallel. In the real world, some individuals appear able to perform two complex tasks at once (e.g., text messaging while biking; see Watson & Strayer, 2010, for evidence of rare individuals with extraordinary multitasking ability). In the laboratory, there have been a few reports of dual-task performance with minimal interference on simple speeded tasks at high levels of training (Hazeltine, Ruthruff, & Remington, 2006a; Schumacher et al., 2001) or on ideomotor-compatible tasks (i.e., tasks for which there is a high conceptual overlap between the stimulus and the sensory feedback from the response, such as in shadowing tasks) at low levels of training (Greenwald & Shulman, 1973; Halvorson, Ebner, & Hazeltine, 2013; Halvorson & Hazeltine, 2015). Thus far, however, most of the apparent laboratory demonstrations of bottleneck bypassing have relied upon combinations of several favorable conditions. It is unclear which of these conditions are necessary or important. In the present study we addressed this issue, with the goal of better understanding the transition from bottlenecking to bypassing (i.e., from serial to parallel central processing).
The psychological refractory period (PRP) effect
A widely used procedure to study dual-task interference is the psychological refractory period (PRP) procedure. Participants make two distinct speeded responses (R1 and R2) to two distinct stimuli (S1 and S2), separated by a stimulus onset asynchrony (SOA) that varies from very short (e.g., 15 ms) to long (e.g., 1,000 ms). The processing overlap between Task 1 and Task 2 is high at short SOAs, but low or even null (when R1 is emitted before S2 occurs) at longer SOAs. Typical instructions emphasize the speed of Task-1 responses. The result is that interference is observed almost exclusively on Task 2, which greatly simplifies model predictions.
In the PRP procedure, a remarkably pervasive phenomenon occurs: a slowing of Task-2 responses, typically by a few hundred milliseconds, at short SOAs. This PRP effect has arisen in a wide variety of experiments, even when the two tasks share neither the same sensory modality (e.g., a visual S1 and an auditory S2) nor the same motor modality (e.g., a vocal R1 and a manual R2). This observation suggests that the PRP effect is not caused by competition between sensory modalities or between motor modalities, but rather by a cognitive limitation located centrally.
The central bottleneck model
Following a proposal by Welford (1952), Pashler (1984; for a review, see Pashler, 1994) developed the central bottleneck model to explain the PRP effect. According to this model (depicted in Fig. 1), the central stage (B) occurs for only one task at a time. Stages are generally considered to be “central” if they come after stimulus identification and before response execution; a classic example is response selection. The result is that the Task-2 central stage (2B) is delayed at short SOAs while the Task-1 central stage (1B) is still underway (thus resulting in central processing that is necessarily serial), but is not delayed at long SOAs. This bottleneck delay, represented by the horizontal dashed line in Fig. 1, is presumed to be the primary cause of the PRP effect. By assumption, the peripheral stages of one task (stages A and C) can be carried out in parallel with any stage of the other task (stages A, B, C).

Central bottleneck model. Processing on each task is decomposed into three stages, labeled A, B, and C. While peripheral stages A and C on one task can proceed in parallel with any stage of the other task, stage B (the bottleneck stage) can operate on only one task at a time, thus creating a delay in Task-2 processing at short but not at long stimulus onset asynchronies (SOAs). S = stimulus; R = response
PRP equation
The PRP effect can be expressed mathematically in terms of the durations of the component stages of Task 1 and Task 2 (Pashler & Johnston, 1989; Ruthruff, Johnston, & Van Selst, 2001):
Because RT1 = 1A + 1B + 1C, it follows that 1A + 1B = RT1 – 1C. When we replace 1A + 1B by RT1 – 1C in Eq. 1, the PRP equation can be rewritten as follows:
If we assume that the postcentral stage of Task 1 (stage 1C) is stable, because response execution (e.g., speaking or button pushing) is already highly practiced, then a simple prediction follows: the longer the RT1, the larger the PRP effect, millisecond for millisecond. Consistent with this prediction, several studies have observed that decreases in RT1 with practice closely mirror decreases in the PRP effect (Ruthruff et al., 2001; Van Selst, Ruthruff, & Johnston, 1999).
Can the central bottleneck be bypassed?
The question of whether the central bottleneck can be bypassed (in the sense of allowing the central stages of two tasks to operate in parallel) has been debated between proponents of a structural limitation (Pashler, 1994; Ruthruff, Johnston, & Remington, 2009) and proponents of a strategic processing deferment (Meyer & Kieras, 1997a, 1997b; Schumacher et al., 1999). Strong incentives for bypassing the central bottleneck at low levels of practice (e.g., equalizing priority instructions, simultaneous presentation of the two stimuli, or financial rewards) have generally failed (e.g., Levy & Pashler, 2001; Ruthruff et al., 2009; but for an exception with ideomotor-compatible tasks, see Halvorson et al., 2013). With novel tasks, which are commonplace in the real world, the central bottleneck appears to be structural.
Other studies have tested for bypassing the central bottleneck through extensive dual-task training. The first attempts revealed little reduction in PRP size following dual-task practice (e.g., Bertelson & Tisseyre, 1969; Borger, 1963; Karlin & Kestenbaum, 1968), supporting the strict structural view of PRP interference. But because these initial attempts used pairs of tasks that both required manual responses, it is also possible that the modest PRP reduction stemmed from stubborn response competition (e.g., de Jong, 1993). Van Selst et al. (1999) minimized peripheral competition by designing a PRP experiment with an auditory–vocal Task 1 and a visual–manual Task 2. Participants performed 36 PRP sessions, totaling more than 14,000 dual-task trials. The amount of PRP interference was 353 ms in Session 1 but shrank to only 36 ms in Session 36. The 91% PRP reduction is impressive, yet the residual PRP effect could still be explained by the presence of a central bottleneck. Indeed, several bottleneck predictions (e.g., nearly perfect correspondence between PRP decreases and RT1 decreases across training, Task-1 carryover, and Task-2 absorption; for more details about such predictions, see Van Selst et al., 1999) were confirmed late in practice.
When looking at the individual data, Van Selst et al. (1999) discovered that one participant had entirely eliminated the PRP effect with practice. Ruthruff, Johnston, Van Selst, Whitsell, and Remington (2003) investigated whether she had truly learned to bypass the central bottleneck (i.e., parallel processing of the Task-1 and Task-2 central stages) or had merely performed the central stages so quickly that they were rarely demanded at the same time, even at the shortest SOA (i.e., rendering the bottleneck in a latent state). To disentangle these two accounts (Fig. 2), Ruthruff et al. (2003) adjusted the SOAs to increase the likelihood of temporal overlap between Task-1 and Task-2 central processing. Consistent with a bottleneck that is structural but latent, this SOA adjustment led to the reemergence of PRP interference: The mean RT2 was longer by 30 ms at the – 216-ms SOA (when S2 was given a head start) relative to the 617-ms SOA.

Two possible accounts of dual-task performance without interference following extensive dual-task training. (A) The central stages of both tasks can operate in parallel, thus bypassing the central bottleneck. (B) The central stages of both tasks are not demanded at the same time, thus rendering “latent” the central bottleneck
Subsequent studies confirmed the near elimination of interference following several training sessions on tasks without motor modality conflicts (Hazeltine, Teague, & Ivry, 2002; Schumacher et al., 2001). These authors did not employ the PRP paradigm, but rather presented S1 and S2 simultaneously on every trial, with equal task emphasis. The problem with training both tasks, however, is that it makes it difficult to unambiguously determine whether the bottleneck has been truly bypassed or is merely latent (see Fig. 2). Given the very short durations of the Task-1 and Task-2 central stages (note that, in these studies, the tasks were both easy and extensively practiced), bottlenecking and bypassing both predicted basically the same thing: little dual-task interference.
The single-task training approach
One way to sidestep the latent bottleneck problem would be to train only one of the two tasks. For instance, Ruthruff, Van Selst, Johnston, and Remington (2006b) trained participants first on only one task (Phase 1) and then presented it as Task 2, along with a novel, unpracticed Task 1, using the PRP procedure (Phase 2). The resulting pairing greatly increases the likelihood that the “long” central stage of Task 1 and the “short” central stage of Task 2 would be demanded at the same time at short SOAs, enabling a genuine test of whether the central bottleneck was bypassed; for instance, bottlenecking should produce large PRP effects, but bypassing should not.
Using this single-task training approach, the competing models make very distinct predictions, depicted in Fig. 3 (and referred to as Prediction 1 and Prediction 2). Bottleneck bypassing predicts small PRP effects on Task 2 (because Task-2 central processing is not delayed while Task-1 central processing is underway) and frequent response reversal (i.e., R2 before R1) at short SOAs (because the fast, practiced Task 2 wins the race against the slower, unpracticed Task 1) but not at long SOAs (because R1 has been emitted before S2’s occurrence). Note that it is unrealistic to expect a 0-ms PRP effect, because the bottleneck is not the only possible cause of dual-task interference (for discussion of various other sources of dual-task interference, see, e.g., Hazeltine et al., 2006), and some participants might still bottleneck some of the time.

Two distinct and testable dual-task processing modes when Task-1 central processing is long and Task-2 central processing is short. (A) Bottleneck bypassing predicts relatively little psychological refractory period (PRP) interference (Prediction 1) and Task-2 responses frequently emitted before Task-1 responses at the shortest stimulus onset asynchrony (SOA) (i.e., R2 before R1; Prediction 2). (B) Bottlenecking predicts large PRP interference on Task 2 (Prediction 1) and Task-2 responses rarely emitted before Task-1 responses at the shortest SOA (R1 before R2; Prediction 2)
Bottlenecking, meanwhile, predicts large PRP effects (because Task-2 central processing is delayed until the long Task-1 central stage is completed) and very few response reversals (i.e., R1 should come before R2 on almost every trial), whatever the SOA. This bottlenecking prediction is clearly distinct from the bypassing prediction precisely because Task 1 is unpracticed and therefore relatively slow. So far, only a few PRP studies have used this approach (i.e., Maquestiaux, Laguë-Beauvais, Bherer, & Ruthruff, 2008; Ruthruff et al., 2006a, b; for its use with older individuals, see Maquestiaux, Laguë-Beauvais, Ruthruff, Hartley, & Bherer, 2010; Maquestiaux, Didierjean, Ruthruff, Chauvel, & Hartley, 2013). Alternative approaches in which participants train on both tasks are problematic, due to the latent bottleneck problem.
Studies using this single-task training approach have obtained evidence of bottleneck bypassing (Ruthruff, Van Selst, et al., 2006b; Maquestiaux et al., 2008). In Ruthruff, Van Selst, et al.’s (2006b) Exp. 2, a speeded choice task requiring a vocal response to a tone (out of four possible tones) was first practiced on eight single-task training sessions. This highly practiced auditory–vocal task was then presented as Task 2, along with a novel, unpracticed Task 1 requiring a manual response to an alphanumeric character (out of eight possible characters), using the PRP procedure. Four participants out of six (i.e., 67% of the sample) were able to bypass the central bottleneck, as evidenced by unusually small PRP effects (from 33 to 67 ms) and a high percentage of response reversals at the shortest SOA (from 66% to 98%). In a later study with slightly more extensive single-task training and an even easier auditory–vocal Task 2 (two possible choices instead of four), Maquestiaux et al. (2008) found evidence of bypassing accompanied by some response grouping (i.e., when both responses were emitted in close temporal succession) for 17 individuals out of 20 (i.e., 85% of the sample). The authors concluded that bottleneck bypassing is genuine.
The present study
Although bottleneck bypassing is clearly possible after training, we know little about how it happens and how general it is. The one clear conclusion so far has been the importance of avoiding response conflicts. As was noted above, early PRP studies using two tasks requiring distinct manual responses reported very large PRP effects despite training, plainly inconsistent with bottleneck bypassing (e.g., Bertelson & Tisseyre, 1969; Borger, 1963; Karlin & Kestenbaum, 1968). In contrast, later dual-task training studies found small residual PRP effects when the two tasks used distinct response systems, namely a vocal response on one task and a manual response on the other (Ruthruff et al., 2001; Van Selst et al., 1999). A few single-task training studies with distinct response systems even confirmed that the bottleneck had been bypassed (Maquestiaux et al., 2008; Ruthruff, Van Selst, et al., 2006b).
In the present study, we investigated sensory–motor modality compatibility, which (for reasons discussed below) seemed likely to be a key enabler of bottleneck bypassing. Stephan and Koch (2011; see also Schaeffner, Koch, & Philipp, 2016; Stephan & Koch, 2010) defined sensory–motor modality compatibility as “the similarity of stimulus modality and the modality of response-related sensory consequences” (Stephan & Koch, 2011, p. 491). Following this definition, a visual–manual (VM) task is compatible, even with completely arbitrary mappings of stimuli onto responses, because moving the hands (and fingers) generally leads to visual changes in the environment.Footnote 1 An auditory–vocal (AV) task is also compatible, since vocal responses lead to audible changes in the environment. In contrast, an auditory–manual (AM) task and a visual–vocal (VV) task can be viewed as incompatible sensory–motor modality tasks, because manual responses are weakly associated with auditory changes and vocal responses are weakly associated with visual changes. One might wonder how manual responses would lead to sensory consequences in the same modality as a visual stimulus (whereas there is no doubt that vocal responses to a tone led to sensory consequences in the same auditory modality). Therefore, in the two experiments reported in this article, we took the precaution of making the visual stimulus disappear as soon as a response was detected. In this way, the sensory consequences of the manual responses to the visual stimuli were in the same sensory modality (i.e., visual).
A well-known specific case of sensory–motor modality compatibility is when the stimulus and the response have high conceptual overlap. This conceptual overlap is central to the concept of ideomotor compatibility, which Greenwald and Shulman (1973) referred to as when “the stimulus resembles sensory feedback from the response” (p. 70). To use examples of ideomotor-compatible tasks in Greenwald and Shulman’s influential study, there is high conceptual overlap when a visually presenting directional arrow (left or right) requires a manual joystick movement in the corresponding direction (left or right) or when the auditory word “high” or “low” requires a corresponding vocal response (a shadowing task). Indeed, in each example of a task, the stimulus and the response rely on codes that are semantically congruent. This semantic congruency is inherent from the physical properties of the stimulus and the response. In the present study, we investigated the role of sensory–motor modality compatibility, rather than ideomotor compatibility, on dual-task automatization. To this end, we employed tasks in which there was no direct conceptual overlap between the physical property of the stimulus (e.g., the visual letter “a” or “A”) and the sensory feedback from the associated response (e.g., pressing the key O for “a” or P for “A”).
What is particularly notable about modality compatibility is that it has large effects on dual-task performance. However, it remains unclear whether it specifically influences the automaticity of dual-task performance. Using a simultaneous dual-task training approach, the data reported by Hazeltine et al. (2006) showed that the reduction in dual-task costs following eight sessions was overall pronounced with compatible pairs of tasks (e.g., a reduction of 69%—from 59 to only 18 ms—on an AV task and a reduction of 91%—from 233 to only 21 ms—on a VM task in Exp. 1b). However, the reduction in interference was much less with incompatible modalities (e.g., a reduction of only 4%—from 206 to 198 ms—on an AM task, and a reduction of 52%—from 150 to 72 ms—on a VV task in Exp. 1a). However, Hazeltine et al.’s (2006) dual-task training approach (training both tasks at the same time) makes it difficult to unambiguously determine whether small residual dual-task costs originate from bottleneck bypassing or latent bottlenecking. As we discussed above, both accounts predict basically the same thing—small dual-task costs—because both tasks are highly practiced (see also Fig. 2).
There are reasons to expect that dual-task automaticity would be extremely difficult to achieve with incompatible modality pairings. One attractive theory of sensory–motor compatibility is inspired by the evidence that working memory is composed of multiple modality-specific subsystems, such as the visuospatial sketchpad and the phonological loop (e.g., Baddeley & Hitch, 1974). We further assumed that both stimuli and responses would be represented within the corresponding working memory subsystem for that modality (cf. the theory of event coding [TEC], which asserts that sensory and motor processes share a common representational medium; e.g., Hommel, Müsseler, Aschersleben, & Prinz, 2001; Mechsner, Kerzel, Knoblich, & Prinz, 2001; Prinz, 1990; see also Hazeltine & Wifall, 2011). We also assumed that practice would progressively enable the stimulus code to quickly and automatically activate the associated response code. When each task relied on a distinct working memory subsystem, there would be no competing codes from the other task within that subsystem. Without competition, the activated response (or the stimulus–response ensemble) could be selected automatically and executed, with no intervention from central attention. But when a working memory subsystem held codes from both tasks, the competitions would have to be resolved by the intervention of central attention. In sum, sensory–motor modality compatibility, in conjunction with practice, would strongly determine the potential for dual-task automaticity.
To determine whether this is the case, the two experiments reported below used a single-task training approach (thus sidestepping the latent bottleneck problem). Our general approach was first to train participants on one task (but not the other). Following this single-task training, automaticity on the highly practiced task was evaluated by presenting it as Task 2, along with an unpracticed Task 1, using the PRP dual-task procedure. We deliberately avoided presenting a dual-task test of automaticity before single-task training. One reason is that a pretest involving bottlenecking might cause the serial-processing strategy to become entrenched. A secondary reason is that a dual-task “pretest” would have increased training on Task 1, in turn, would have increased the Task-1 processing speed, thus working against our goal of pairing a slow Task 1 with a fast Task 2.
In each experiment, the key manipulation (between groups) was whether Task 1 and Task 2 were both sensory–motor modality-compatible (i.e., AV and VM) or sensory–motor modality-incompatible (i.e., AM and VV). We did not employ conditions with one compatible task and one incompatible task (e.g., VM and AM), because such a design would create conflicts in either the input or the output modality (e.g., manual responses to both tasks, which is already believed to inhibit bypassing). The two experiments were essentially conceptual replications of each other, differing in which task was assigned to Task 1 and which to Task 2 (see Table 1). Specifically, the stimulus of the highly practiced Task 2 was visual in Experiment 1 and auditory in Experiment 2.
The predictions are straightforward. If sensory–motor modality compatibility is key to enabling dual-task automatization through bottleneck bypassing (i.e., parallel processing of the central stages of the two tasks), then the two indicators of bottleneck bypassing—small PRP effects and high rate of response reversals at the shortest SOA—should be met in conjunction when the two tasks used compatible sensory–motor modalities. In contrast, the two indicators of bottlenecking—large PRP effects and low rate of response reversals at the shortest SOA—should be found when the tasks used incompatible sensory–motor modalities. These predictions about the effects of sensory–motor modality compatibility on dual-task automatization should hold regardless of whether the highly practiced Task 2 was visual (in Exp. 1) or auditory (in Exp. 2).
Because bottleneck bypassing and bottlenecking make very distinctive predictions within our dual-task test of automaticity, we anticipated large effect sizes, and therefore anticipated sufficient statistical power with samples of six to nine participants per group (similar to those of previous training studies—e.g., four participants per sensory–motor modality group in Hazeltine et al., 2006, Exp. 2; six participants in Van Selst et al., 1999). Note that each participant was well-practiced (small standard deviations) and contributed two dual-task sessions, which helped stabilize performance. We recruited nine participants for each modality group in Experiment 1, and nine participants for the incompatible-modality group in Experiment 2. The sample sizes were fixed in advance (n = 9), and all participants were run as a single batch over a period of about three weeks. One participant in the incompatible-modality group in Experiment 1 did not complete all nine sessions, as did three participants in the incompatible-modality group in Experiment 2.
We reused data from Maquestiaux et al. (2008) for the compatible-modality group in Experiment 2, taking advantage of their unusually large number of participants (N = 20), rather than testing nine new participants. Even though replication is of high importance in science (for a discussion, see, e.g., Pashler & Harris, 2012), it was not an issue here, given that the reused data came from a study with an unusually large sample size,Footnote 2 which was itself already a successful replication of Ruthruff, Van Selst, et al. (2006b).
Experiment 1
Pairing a highly practiced visual Task 2 with an unpracticed auditory Task 1
To determine the boundary conditions for bottleneck bypassing, we manipulated whether the sensory–motor modalities for the auditory Task 1 and the visual Task 2 were both compatible or both incompatible. Table 1 summarizes the compatible and incompatible sensory–motor modalities used on Tasks 1 and 2 in Experiment 1 (as well as in Exp. 2).
Participants were first trained on the visual discrimination task only. During each of the six single-task training sessions, they performed 840 trials in which they indicated whether a letter (“a” or “A”) was lower- or uppercase. The participants assigned to the compatible-modality group responded manually to the case of the letter (i.e., by pressing one of two keys aligned horizontally: the O key for “a” or the P key for “A”). The participants assigned to the incompatible-modality group responded vocally (i.e., by saying aloud “ONE” to “a” or “TWO” to “A”). Note that responding to the visual letter was accompanied by its disappearance from the screen (i.e., a sensory consequence associated with the response that is in the visual modality). To assess bottleneck bypassing by this highly practiced visual task, it was then presented as Task 2 in the PRP procedure (three sessions) along with a novel, unpracticed auditory Task 1. The stimulus for Task 1 was a briefly presented sound (zip, slap, horn, or guitar riff), which required a vocal response for participants in the compatible-modality group (saying “ONE,” “TWO,” “THREE,” or “FOUR”) but a manual response for participants in the incompatible-modality group (pressing the key Q, S, D, or F on an azerty keyboard).
Method
Participants performed nine sessions lasting about 1 h each, spread over nine different testing days (three sessions per week): six single-task training sessions on a visual task, followed by three PRP test sessions.
Participants
Eighteen students were recruited from the Université Paris-Saclay (Orsay, France) and were paid to participate in this experiment (€5 per session). Because one participant assigned to the incompatible-modality group could not complete the whole experiment, a sample of 17 students completed the entire experiment. Participants were screened for normal or corrected-to-normal vision and hearing via self-report. All were native French speakers. None reported difficulties discriminating the auditory and visual stimuli. The data for one participant assigned to the compatible condition were lost for the training phase but not for the PRP test phase. We opted to report this participant’s PRP test data.
Stimuli
Auditory Task 1
Task 1 was to identify a sound presented for a duration of 150 ms. The sound was either a zip, slap, horn, or guitar riff.Footnote 3
Visual Task 2
Task 2 was to identify whether the first letter of the alphabet was presented in lower or upper case (“a” or “A”). The letter was presented in Times New Roman font at the center of the screen and subtended approximately 1.49° vertically × 1.04° horizontally at a viewing distance of 46 cm. The background was white, and the letter was black.
Apparatus
The experiments were programmed with E-Prime and run on a Dell laptop computer, coupled with the serial response box (Psychology Software Tools) and an additional keyboard. Auditory stimuli were presented through headphones. The onset of vocal responses was picked up by the voice key integrated within the serial response box and the experimenter manually entered the participant’s vocal response on the additional keyboard. Manual responses were given using the laptop azerty keyboard.
Procedure
Participants were randomly assigned to one of two compatibility conditions. In the compatible condition, they responded manually to the letter “a” or “A” by pressing the O key or the P key, using the index and middle finger of the right hand, respectively. They responded vocally to the zip, slap, horn, or guitar riff sound by saying “one,” “two,” “three,” or “four,” respectively. In the incompatible condition, they responded vocally to the letter “a” or “A” by saying “one” or “two,”, respectively. They responded manually to the zip, slap, horn, or guitar riff sound by pressing the Q, S, D, or F key, using the four fingers (not counting the thumb) of the left hand. In short, the dual-task pairings were AV Task 1 and VM Task 2 in the compatible condition, and AM Task 1 and VV Task 2 in the incompatible condition.
During the training phase, participants performed a total of 5,040 trials on the visual task (which later become Task 2 in the PRP test phase) over six single-task training sessions. Each training session consisted of 840 repetitions of the visual task, consisting of 14 blocks of 60 trials separated by 2-min breaks. During each break, the computer provided feedback on the average speed and average accuracy from the previous block. Participants were instructed to respond as quickly and accurately as possible, as well as to consistently improve their performance from one block to the next.
During the PRP test phase, participants performed three sessions that paired the highly practiced visual task as Task 2 with an unpracticed auditory Task 1, using the PRP procedure. Because participants had to learn a new task and a new paradigm, the first test session was considered practice and therefore not included in the analyses. Each PRP session consisted of 20 warm-up dual-task trials followed by 384 experimental dual-task trials. There were eight possible combinations of the auditory and visual stimuli (4 possible sounds × 2 possible cases for the letter) for each of the six SOAs separating the auditory Task-1 onset and the visual Task-2 onset (15, 65, 150, 250, 550, and 1,000 ms), thus yielding 48 distinct experimental trials. The total of 384 experimental dual-task trials per session resulted from a random ordering of eight repetitions of the 48 experimental trials. The PRP sessions were broken into eight blocks of 48 trials, separated by 2-min breaks. During each break, the computer provided feedback on the average speed at which the participants had performed Task 1 and their accuracy performing both Task 1 and Task 2 from the previous block.Footnote 4 Participants were given typical PRP instructions: Respond as quickly and accurately as possible to each task while emphasizing the speed of Task-1 responses. There were no explicit verbal instructions regarding response order or response grouping.
In both phases of the experiment, each trial began with the presentation of a black asterisk for 500 ms in the center of a white screen. Then a random foreperiod of 100–250 ms (in steps of 50 ms) was introduced. In the dual-task condition, the Task-1 sound was followed by the Task-2 letter (which appeared in the screen center) after one of six randomly selected SOAs (15, 65, 150, 250, 550, or 1,000 ms). The Task-2 letter remained until a response had been registered or 2,500 ms had elapsed. During single-task training (on the visual task that became Task 2 in the PRP test phase), only the letter was presented. The timing of the Task-2 letter in this single-task condition was yoked to that of the dual-task condition: Following the random foreperiod, there was an additional delay equivalent to the SOA in the dual-task trials.
After each trial, a message displayed for 600 ms informed participants whether they had made erroneous or correct responses on the two tasks in the dual-task condition (Phase 2) or on Task 2 in the single-task condition (Phase 1). Also, if the participant responded to a stimulus within 100 ms of its onset, a “trop rapide” (French for “too early”) message was displayed for 600 ms. If the participant failed to respond to a stimulus within 2,500 ms of its onset, a “trop lent” (French for “too slow”) message was displayed for 600 ms. The intertrial interval was 1,000 ms.
Results
Only trials with RTs between 100 and 2,500 ms were analyzed. These RT cutoffs led to the removal of 0.72% of single-task trials and 1.32% of the dual-task trials. Trials with errors were excluded from the RT analyses. The first dual-task session was considered practice; only the second and third dual-task sessions were analyzed.Footnote 5
Training phase
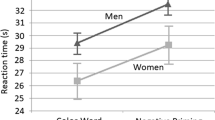
Figure 4 shows the reduction in mean RTs on the visual task across training sessions. Single-task training significantly shortened the RT from Session 1 (M = 389 ms) to Session 6 (M = 331 ms), F(5, 70) = 27.49, p ≤ .001 (η p 2 = .66). The RT to the visual stimulus was faster overall when it was paired with a manual response (M = 315 ms) rather than a vocal response (M = 387 ms), F(1, 14) = 22.46, p ≤ .001 (η p 2 = .62). We found a significant interaction between sensory–motor modality compatibility and training session, F(5, 70) = 2.56, p = .035 (η p 2 = .15); the mean VM task RT declined by 41 ms, whereas the mean VV task RT declined by 75 ms. In the last training session, the RT was shorter by 58 ms on the VM task (M = 302 ms) than on the VV task (M = 360 ms), t(14) = 3.54, p ≤ .01.

Mean response times (RTs) during single-task training as a function of training session and sensory–motor modality compatibility. The left panel shows the visual task in Experiment 1, and the right panel shows the auditory task in Experiment 2. Here and in all figures below, error bars represent within-subjects 95% confidence intervals (Loftus & Masson, 1994), computed separately for each sensory–motor compatibility group
Error rates increased across sessions (2.63% in Session 1 to 6.46% in Session 6), F(5, 70) = 14.41, p ≤ .001 (η p 2 = .51). This effect was more prominent for the VM task (4.07% to 8.63%) than for the VV task (1.20% to 4.34%), F(5, 70) = 2.56, p = .035 (η p 2 = .15).
PRP test sessions
Auditory Task 1 RTs
Figure 5 shows the mean RTs (averaged across the last two dual-task test sessions) on the unpracticed auditory Task 1 across SOAs. Mean RTs on the auditory Task 1 did not differ significantly between the participants who responded manually (M = 621 ms) and those who responded vocally (M = 580 ms), F(1, 15) ≤ 1 (η p 2 = .04). Performance on the auditory Task 1 remained stable across SOAs, F(5, 75) = 1.53, p = .189 (η p 2 = .09). Task-1 response modality and SOA did not interact, F(5, 75) ≤ 1 (η p 2 = .02).

Mean response times (RTs) on the auditory Task 1 as a function of sensory–motor modality compatibility (incompatible or compatible) and stimulus onset asynchrony (SOA) in Experiment 1
Visual Task-2 RTs
Figure 6 shows the mean RTs (averaged across the two last dual-task test sessions) for the highly practiced Task 2 across SOAs—the PRP effect. Overall, the sensory–motor modality of the visual task (VM vs. VV) greatly influenced performance: The mean RT for the visual stimulus was shorter by 296 ms for participants who emitted manual responses (M = 420 ms) rather than vocal responses (M = 716 ms), F(1, 15) = 29.13, p ≤ .001 (η p 2 = .66). The PRP effect, measured as the total RT2 increase from the longest SOA to the shortest SOA, was much higher for the incompatible sensory–motor modality group (PRP effect = 526 ms; 95% CI [420, 632 ms]) than for the compatible sensory–motor modality group (PRP effect = 236 ms; 95% CI [155, 317 ms]), as evidenced by a significant interaction between SOA and sensory–motor modality compatibility, F(5, 75) = 23.05, p ≤ .001 (η p 2 = .61).

Mean response times (RTs) on the visual Task 2 as a function of sensory–motor modality compatibility (incompatible or compatible) and stimulus onset asynchrony (SOA) in Experiment 1
According to Eq. 2 of the central bottleneck model, PRP size primarily depends upon the duration of RT1. Relatedly, similar RT1s should yield PRP effects of similar sizes. However, we found a sizable, 290-ms PRP difference between the VM Task 2 and VV Task 2, even though the mean RT1s did not differ significantly (only 41 ms) between the AV Task 1 and the AM Task 1. The large PRP difference is also much larger than the 80-ms RT2 difference at the longest SOA between the VM Task 2 (M = 338 ms) and the VV Task 2 (M = 418 ms), t(15) = 4.40, p ≤ .001. In other words, sensory–motor modality compatibility seems to specifically modulate dual-task costs, without much effect on baseline (single-task) performance.
Response reversal rates
The Task-1 stimulus always preceded the Task-2 stimulus and instructions emphasized Task-1 processing speed. In the case of bottlenecking, the Task-1 response should always precede the Task-2 response, at all SOAs. In the case of bottleneck bypassing, however, the Task-2 response should precede the Task-1 response at short SOAs (because the Task-2 response “wins the race” with the Task-1 response) but not at long SOAs (because Task 2 starts much later than Task 1, it cannot catch up).
Figure 7 shows the mean response reversal rates as a function of SOA and modality compatibility. The response reversal rate was virtually nil in the incompatible-modality group (M = 0.9%) but was large in the compatible-modality group (M = 23.0%), F(1, 15) = 15.16, p ≤ .01 (η p 2 = .50). Also, SOA did not influence the response reversal rate in the incompatible-modality group, but reversals increased dramatically from the longest SOA (M = 0.38%) to the shortest SOA (M = 48.4%) in the compatible-modality group, F(5, 75) = 17.67, p ≤ .001 (η p 2 = .54). In summary, the pattern of response reversal is consistent with bottlenecking in the incompatible-modality group but with bottleneck bypassing in the compatible-modality group.

Percentages of response reversals at each stimulus onset asynchrony (SOA) for the compatible and incompatible sensory–motor modality groups in Experiment 1
Error rates
Table 2 shows mean error rates on both Tasks 1 and 2 in Experiments 1 and 2.
For the auditory Task 1, error rates did not differ significantly between the compatible AV Task 1 (M = 5.93%) and the incompatible AM Task 2 (M = 7.60%), F(1, 15) = 1.79, p = .201 (η p 2 = .11). Error rates were slightly higher at the three shortest SOAs (M = 8.35%) relative to the two longest SOAs (M = 4.50%), F(5, 75) = 8.96, p ≤ .001 (η p 2 = .37), perhaps reflecting some trading of accuracy for speed at short SOAs, to compensate for some of the dual-task slowing. Sensory–motor modality compatibility and SOA did not interact, F(5, 75) ≤ 1 (η p 2 = .06).
For the visual Task 2, error rates did not differ significantly between the compatible VM Task 2 (M = 6.42%) and the incompatible VV Task 2 (M = 3.40%), F(1, 15) = 2.87, p = .111 (η p 2 = .16). SOA had no significant influence, F(5, 75) = 1.59, p = .174 (η p 2 = .10). Sensory–motor modality compatibility and SOA did not interact, F(5, 75) ≤ 1 (η p 2 = .02).
Discussion
The goal of this experiment was to examine whether sensory–motor modality compatibility plays a key role in automatizing dual-task performance through bottleneck bypassing (i.e., parallel central processing). Consistent with bottleneck bypassing, a relatively small overall PRP effect (236 ms) and a high percentage of response reversals at the shortest SOA (48.4%) were observed in the compatible-modality group (i.e., AV Task 1/VM Task 2 pairing). But, consistent with bottlenecking, a large PRP effect (526 ms) and virtually no response reversals (less than 1% of trials) were observed in the incompatible-modality group (i.e., AM Task 1/VV Task 2 pairing). These sharp differences in dual-task performance occurred even though the stimuli and responses were the same across conditions and even though baseline performance was similar. The quantitative differences point out to qualitative differences between the compatible- and incompatible-modality groups in the way the highly practiced visual task was processed under dual-task conditions.
We chose to not expose our participants to a dual-task pre-test, primarily for fear that it would ingrain a bottleneck strategy and undesirably reduce RT1 (as discussed in the introduction). As a result, however, the present results leave open the possibility that sensory–motor modality compatibility is, by itself, sufficient to enable bottleneck bypassing, even without any practice. We evaluated this possibility by running two control experiments in which 20 participantsFootnote 6 (n = 10 per control experiment) performed only one PRP test session. The procedure was identical to that used for the two modality groups in Experiment 1, except that there was no single-task training session and only one PRP test session. When looking at the two key indicators of bottleneck bypassing, we found that, with compatible modalities, (1) the amount of PRP interference was larger for the control group (M = 626 ms) than for the trained group (M = 236 ms), t(17) = 7.91, p ≤ .001, and (2) the response reversal rate at the shortest SOA was much smaller for the control group (M = 7.4%) than for the trained group (M = 48.4%), t(17) = – 4.40, p ≤ .001, but that, with incompatible modalities, (1) the amounts of PRP interference did not differ between the control group (M = 592 ms) and the trained group (M = 526 ms), t(16) ≤ 1, and (2) response reversal rates at the shortest SOA did not differ between the control group (M = 7.2%) and the trained group (M = 1.0%), t(16) ≤ 1. These resultsFootnote 7 strongly suggest that it is the conjunction of modality compatibility with training, rather than the modality compatibility by itself, that enables bottleneck bypassing.
As is described in Appendix A, we also applied two analytical tools to the data from individual participants, to estimate the prevalence of individuals able to bypass the central bottleneck. There were converging indicators consistent with bottleneck bypassing for eight out of the nine participants in the compatible-modality group (four of whom also showed a propensity for response grouping while bypassing). However, none of the eight participants in the incompatible-modality group showed any evidence of bypassing.
Experiment 2
Pairing a highly practiced auditory Task 2 with an unpracticed visual Task 1
In Experiment 1, we found that a highly practiced visual Task 2 could operate automatically, through bottleneck bypassing, when Task 1–Task 2 sensory–motor modality pairings were compatible (i.e., AV–VM), but not when the pairings were incompatible (i.e., AM–VV). Replicating this finding with the reverse task order (i.e., visual Task 1 and auditory Task 2) was the purpose of Experiment 2. Our motivation was to ensure that the critical factor for enabling bottleneck bypassing is indeed the sensory–motor modality pairings, and not merely the particular sensory or response modality of Task 2.
We reversed the task order while keeping every other aspect the same (e.g., two-phase procedure, same number of single-task training trials and dual-task trials, same set of SOAs, equivalent number of stimulus–response alternatives on each task). Specifically, we paired a highly practiced auditory task (as Task 2) with an unpracticed visual Task 1. Again, the critical manipulation was whether the sensory–motor modality pairings were compatible or incompatible (see Table 1).
For the incompatible-modality group, we recruited nine new participants, but only six of them completed all nine sessions. They were first trained on an AM task (single-task training), which was then used as the highly practiced AM Task 2, paired with an unpracticed VV Task 1 (PRP test sessions). For the compatible-modality group, we reused available data from Maquestiaux et al. (2008), in which 20 participants were first trained on an AV task (single-task training), which was then paired as the highly practiced AV Task 2 with an unpracticed VM Task 1 (PRP test sessions). Because spatial compatibility between the visual stimulus and the associated finger response (compatible vs. incompatible; a within-subjects factor) was manipulated for this unpracticed VM Task 1,Footnote 8 we simply removed all spatially incompatible S–R trials (i.e., 50% of the trials), thus allowing for direct comparisons with the incompatible-modality group (all trials on Task 1 were now spatially S–R compatible for the two modality groups). Note that this removal was not a threat to statistical power because of the large sample size (n = 20) and the use of two dual-task sessions per participant.
From Maquestiaux et al.’s (2008) compatible-modality group (VM Task 1 and AV Task 2), we already knew that bottleneck bypassing would be found, as evidenced by a small PRP effect and a high percentage of response reversals at the shortest SOA. What was less clear was whether the incompatible-modality group (VV Task 1 and AM Task 2) would be unable to bypass the central bottleneck.
Method
Except where noted, the procedure was identical to that used in Experiment 1.
Participants
The 20 participants in the compatible-modality group were recruited from the Université du Québec à Montréal and the Institut Universitaire de Gériatrie de Montréal, and the six participants in the incompatible-modality group were students recruited from Université Paris-Saclay. All were native French speakers. They were paid ($10 Canadian or €5 per session).
Stimuli
Visual Task 1
Task 1 was to identify a single alphanumeric character, drawn from the set {1, 2, 3, 4, A, B, C, D} for the compatible-modality group, from the set {1, 2, 3, 4} for one half of the participants in the incompatible-modality group, and from the set {A, B, C, D} for the other half in the incompatible-modality group.
Auditory Task 2
Task 2 was to identify one of two possible tones presented for 150 ms. The tone highest in pitch (1800 Hz) was labeled as a high tone, and the tone lowest in pitch (400 Hz) was labeled as a low tone.
Procedure
In the compatible-modality group, the participants responded to the character {A, B, C, D, 1, 2, 3, 4} by pressing the “f,” “t,” “y,” or “j” key on a qwerty keyboard, using the fingers of the right hand (with the exception of the thumb). For half of them, the numbers were mapped compatibly (1, 2, 3, 4) onto the four response keys from left to right, whereas the letters were mapped incompatibly (C, A, D, B) onto the same four keys. For the other half of the participants, the letters were mapped in alphabetic order (A, B, C, D), whereas the numbers were mapped in a scrambled order (3, 1, 4, 2). In the incompatible-modality group, one half of the participants responded vocally “un,” “deux,” “trois,” or “quatre” (French for “one,” “two,” “three,” or “four”) to the letter {A, B, C, or D}, and the other half responded vocally “A,” “B,” “C,” or “D” to the digit {1, 2, 3, or 4}. The Task-1 character remained until a response was registered or until 2,500 ms had elapsed
Response to the pitch of the tone was made by saying either “haut” or “bas” (French for “high” or “low”) in the compatible-modality group, but by pressing either the A key (for the high tone) or the Q key (for the low tone) on an azerty keyboard (with the A key located above the Q key) for the participants in the incompatible-modality group.
During the training phase, participants performed a total of 5,040 trials on the auditory task (which later become Task 2 in the PRP test phase) over six single-task training sessions.
During the PRP test phase, participants performed three sessions; each performed a total of 384 experimental dual-task trials per session, resulting from a random ordering of eight repetitions of the 48 experimental trials (4 possible visual characters × 2 possible tones × 6 SOAs) in the incompatible-modality group, and from a random ordering of four repetitions of the 96 experimental trials (8 possible visual characters × 2 possible tones × 6 SOAs) in the compatible-modality group. For the compatible-modality group, only the data for which letters or numbers were mapped compatibly onto the response keys were included in the analyses, thus allowing for direct comparisons between the two modality groups while equating the difficulty on the visual Task 1.Footnote 9
Results
Trials with RTs between 100 and 2,500 ms were analyzed. These RT cutoffs led to the removal of 0.52% of single-task trials and 1.04% of dual-task trials in the incompatible-modality group, and of 3.29% of single-task trials and 5.76% of dual-task trials in the compatible-modality group.Footnote 10 Trials with errors were excluded from the RT analyses. The first dual-task session was considered practice; only the second and third dual-task sessions were analyzed.Footnote 11
Training phase
Figure 4 shows the reduction in mean RTs on the auditory task across training sessions. Single-task training significantly shortened the RT from Session 1 (M = 413 ms) to Session 6 (M = 285 ms), F(5, 120) = 40.60, p ≤ .001 (η p 2 = .63). The RT for the auditory stimulus was faster overall when the stimulus was paired with a manual response (M = 297 ms) rather than a vocal response (M = 363 ms), F(1, 24) = 4.28, p ≤ .05 (η p 2 = .15).Footnote 12 There was a significant interaction between sensory–motor modality compatibility and training session, F(5, 120) = 5.73, p ≤ .001 (η p 2 = .19); the mean AV task RT declined by 170 ms, whereas the mean AM task RT declined by 85 ms. In the last training session, the RT was shorter by 45 ms on the AM task (M = 263 ms) than on the AV task (M = 308 ms), t(24) = 2.18, p ≤ .05.
Error rates did not differ between the AV task (M = 4.97%) and the AM task (M = 6.36%), F(1, 24) ≤ 1 (η p 2 = .04). Training did not influence the error rate, F(5, 120) ≤ 1 (η p 2 = .02). Sensory–motor modality compatibility and training session did not interact significantly, F(5, 120) = 1.46, p = .21 (η p 2 = .06).
PRP test sessions
Visual Task 1 RTs
Figure 8 shows the mean RTs (averaged across the last two dual-task test sessions) on the unpracticed visual Task 1 across SOAs. The mean RTs on the visual Task 1 were comparable between participants who responded vocally (M = 524 ms) and participants who responded manually (M = 562 ms), F(1, 24) = 1.07, p = .31 (η p 2 = .04). Performance on the visual Task 1 was slower on average by 21 ms at the longest SOA (M = 567 ms), relative to the 15-ms SOA (M = 547 ms), 150-ms SOA (M = 545 ms), and 250-ms SOA (M = 546 ms), as evidenced by a significant main effect of SOA, F(5, 120) = 2.48, p ≤ .05 (η p 2 = .09). Task-1 response modality and SOA did not interact, F(5, 120) ≤ 1 (η p 2 = .02).

Mean response times (RTs) on the visual Task 1 as a function of sensory–motor modality compatibility (incompatible or compatible) and SOA in Experiment 2
Auditory Task 2 RTs
Figure 9 shows the mean RTs (averaged across the last two PRP test sessions) on the highly practiced Task 2 across SOAs. Overall, the sensory–motor modality of the auditory task (AV vs. AM) greatly influenced performance: The mean RT was shorter by 127 ms for participants who emitted vocal responses (M = 466 ms) rather than manual responses (M = 593 ms), F(1, 24) = 4.43, p ≤ .05 (η p 2 = .16). The PRP effect (RT2 increase from the longest to the shortest SOA) was much higher for the incompatible sensory–motor modality group (PRP effect = 497 ms; 95% CI [374, 619 ms]) than for the compatible sensory–motor modality group (PRP effect = 194 ms; 95% CI [122, 266 ms]), as evidenced by a significant interaction between SOA and sensory–motor modality compatibility, F(5, 120) = 18.51, p ≤ .001 (η p 2 = .44).

Mean response times (RTs) on the auditory Task 2 as a function of sensory–motor modality compatibility (incompatible or compatible) and SOA in Experiment 2
Following Eq. 2 of the central bottleneck model, similar RT1s should roughly yield PRP effects of similar size. But we found a sizable, 303-ms PRP difference between the AV Task 2 and AM Task 2, even though the mean RT1s were comparable between the VM Task 1 and the VV Task 1. Also note that the mean RTs at the longest SOA (i.e., at baseline) did not differ between the AM Task 2 (M = 316 ms) and the AV Task 2 (M = 360 ms), t(24) = 1.27, p = .214. This lack of a substantial compatibility effect on baseline performance confirms the finding of Experiment 1 and further supports the conclusion that the large increase in the PRP effect with incompatible modality pairings specifically reflects a dual-task problem.
Response reversal rates
Figure 10 shows the mean response reversal rates as a function of SOA and modality compatibility. The response reversal rate was nearly zero for the incompatible-modality group (M = 2.92%) but was much larger for the compatible-modality group (M = 22.16%), F(1, 24) = 9.72, p ≤ .01 (η p 2 = .29). Also, SOA did not influence response reversal rate in the incompatible-modality group, but it increased the response reversal rate in the compatible-modality group from the longest SOA (M = 0.27%) to the shortest SOA (M = 52.06%), as evidenced by a significant interaction between SOA and modality compatibility, F(5, 120) = 8.67, p ≤ .001 (η p 2 = .27). This pattern of results is consistent with bottlenecking in the incompatible-modality group but with bottleneck bypassing in the compatible-modality group.

Percentages of response reversals at each stimulus onset asynchrony (SOA) for the compatible sensory–motor modality group and the incompatible sensory–motor modality group in Experiment 2
Error rates
For the visual Task 1, error rates did not differ significantly between the compatible VM Task 1 (M = 2.71%) and the incompatible VV Task 1 (M = 3.39%), F(1, 24) ≤ 1 (η p 2 = .02). Error rates were higher at the shortest SOA (M = 4.56%) than at the two longest SOAs (M = 2.25%), F(5, 120) = 3.40, p ≤ .01 (η p 2 = .12), perhaps reflecting a speed–accuracy trade-off to partially compensate for dual-task slowing. Sensory–motor modality compatibility and SOA did not interact, F(5, 120) = 1.14, p = .34 (η p 2 = .06).
For the auditory Task 2, there was a tendency, albeit nonsignificant, toward larger error rates for the incompatible AM Task 1 (M = 8.83%) than for the compatible AV Task 1 (M = 4.70%), F(1, 24) = 3.73, p = .07 (η p 2 = .13). Error rates were also slightly higher at the 15-ms SOA (M = 6.86%) than at the 550-ms SOA (M = 4.48%), F(5, 120) = 2.783, p ≤ .05 (η p 2 = .10). Sensory–motor modality compatibility and SOA did not interact, F(5, 120) ≤ 1 (η p 2 = .04).
Discussion
The goal of this experiment was to replicate the findings from Experiment 1 (i.e., automatic processing of a highly practiced visual Task 2 when sensory–motor modality pairings on both Task 1 and Task 2 were compatible), but in a different sensory modality (i.e., the Task-2 stimulus in the auditory modality rather than visual). The results nicely replicated those from the previous experiment. Consistent with bottleneck bypassing (i.e., parallel central processing), a small PRP effect (194 ms) and a high percentage of response reversals at the shortest SOA (52.06%) were observed in the compatible-modality group (i.e., VM Task 1 and AV Task 2). But, consistent with bottlenecking, a large PRP effect (497 ms) and a very low rate of response reversals (≤ 3%) were observed in the incompatible-modality group (i.e., VV Task 1 and AM Task 2). Clearly, sensory–motor modality compatibility plays a key role in automatizing dual-task performance through bottleneck bypassing.
But is sensory–motor modality compatibility sufficient by itself to enable bottleneck bypassing, even without training? To evaluate this possibility, we ran two control experiments in which 20 participantsFootnote 13 (n = 10 per control experiment) performed only one PRP test session, identical to the procedure used in Experiment 2, except that no single-task training session and only one PRP test session were performed. When looking at the two key indicators of bottleneck bypassing, we found that, with compatible modalities, (1) the amount of PRP interference was larger for the control group (M = 394 ms) than for the trained group (M = 194 ms), t(28) = 3.05, p ≤ .01, and (2) the response reversal rate at the shortest SOA was smaller for the control group (M = 4.1%) than for the trained group (M = 52.1%), t(28) = – 4.33, p ≤ .001. With incompatible modalities, however, (1) the amounts of PRP interference did not differ between the control group (M = 464 ms) and the trained group (M = 497 ms), t(14) ≤ 1, and (2) the response reversal rates at the shortest SOA did not differ between the control group (M = 2.50%) and the trained group (M = 5.69%), t(14) ≤ 1. Therefore, these resultsFootnote 14 once again indicate that the conjunction of modality compatibility and training, rather than modality compatibility by itself, is what enables bottleneck bypassing.
As is described in Appendix B, we again estimated the prevalence of individuals able to bypass the central bottleneck (using the same analytical tools as in Appx. A). Our indicators showed that 17 out of the 20 participants in the compatible-modality group bypassed the central bottleneck. However, none of the six participants in the incompatible-modality group showed such evidence (although one may have bypassed on a small proportion of trials).
General discussion
In the present study, we examined whether sensory–motor modality compatibility is critical for allowing people to automatize dual-task performance through bottleneck bypassing (i.e., parallel central processing). Although Hazeltine et al. (2006) demonstrated that this factor greatly influenced the overall amount of dual-task interference, their methodology (i.e., dual-task training on both tasks) did not allow them to unambiguously determine whether it influenced bypassing (see Fig. 2). To overcome this problem, we used single-task training on only one task, followed by PRP test sessions to probe for automaticity. As is shown in Fig. 3, this approach pairs a highly practiced Task 2 with an unpracticed Task 1, so RT1 remains long, thereby allowing us to diagnose bottleneck bypassing while sidestepping the latent bottleneck problem (Maquestiaux et al., 2008; Ruthruff et al., 2006a, b).
Bottleneck bypassing was found in Experiments 1 and 2 only for compatible sensory–motor modalities (i.e., AV Task 1 and VM Task 2, VM Task 1 and AV Task 2). First, PRP effects were relatively small: only 236 ms on the highly practiced VM Task 2 and only 194 ms on the highly practiced AV Task 2. Although greater than zero, these PRP effects were much smaller than expected given the long RT1. Second, response reversal rates at the shortest SOA were high: 48.4% in Experiment 1, 52.1% in Experiment 2. Because they were smaller than 100%, these reversal rates also suggest that participants in compatible-modality groups may not have bypassed all the time. In sharp contrast, bottlenecking was diagnosed in the two experiments for incompatible sensory–motor modalities (i.e., AM Task 1 and VV Task 2, VV Task 1 and AM Task 2). First, PRP effects were very large: 526 ms on the highly practiced VV Task 2 and 497 ms on the highly practiced AM Task 2. Second, response reversals were rare: less than 1% of trials in Experiment 1 and only 2.9% in Experiment 2. The inability to automatize dual-task performance is particularly impressive for the incompatible-modality group in Experiment 2, because this group was tested on an easier Task 1 (all S–R mappings were spatially compatible) than was the compatible-modality group (for whom the S–R mappings could be either spatially compatible or incompatible). Sensory–motor modality compatibility clearly influenced people’s ability to automatize dual-task performance through bottleneck bypassing (i.e., parallel central processing).
Converging evidence from RT1–RT2 correlations
Following a reviewer suggestion, we examined an additional tool for diagnosing bottlenecking versus bottleneck bypassing: the correlations between RT1 and RT2. In the case of bottlenecking, the RT1:RT2 correlations should be much stronger at the shortest SOA than at the longest SOA. At the shortest SOA, random variation in stages 1A and 1B (see Fig. 3B) would also be inherited by Task 2 after the bottleneck delay. Because of the shared variation, RT1 and RT2 should be highly correlated. At the longest SOA, however, the correlation should be small, because the tasks would be performed more or less independently (though some minor residual correlation might occur due to trial-by-trial variations in practice level, alertness, and fatigue). In the case of bottleneck bypassing, however, the tasks would be performed more or less independently, and thus the RT1:RT2 correlations should be weak at all SOAs. The results clearly supported these predictions in both experiments.
For the incompatible-modality group in Experiment 1, the mean correlation coefficient across participants at the shortest SOA (.84) was stronger than at the longest SOA (.33), t(7) = 5.96, p ≤ .001, consistent with bottlenecking. But, for the compatible-modality group in Experiment 1, the mean correlation coefficients at the shortest SOA (.22) and the longest SOA (.19) were small and did not differ, t(8) ≤ 1, consistent with bottleneck bypassing. For the incompatible-modality group in Experiment 2, the mean correlation coefficient at the shortest SOA (.63) was stronger than that at the longest SOA (.24), t(5) = 2.80, p ≤ .001, consistent with bottlenecking. But for the compatible-modality group in Experiment 2, the mean correlation coefficients at the shortest SOA (.34) and the longest SOA (.20) were small and did not differ, t(19) = 1.62, p = .123, consistent with bottleneck bypassing. Overall, these additional analyses are consistent with the view that the bottleneck was bypassed only when the sensory–motor modalities of the tasks were compatible.
The correlations also bear on a possible alternative explanation of our data. One could attempt to reconcile the indicators of bottleneck bypassing (small PRP effects, high rate of reversals at short SOAs) with a modified version of the central bottleneck, in which participants reversed the central-processing order at short SOAs (i.e., the Task-2 central stage was followed by the Task-1 central stage). According to this possibility, however, the RT1:RT2 correlations should have been high, yet (as we noted above) they were actually low. Also, PRP effects should then have arisen on Task 1 at short SOAs (due to the postponement of the Task-1 central stage while the Task-2 central stage was underway). Inconsistent with this prediction, there was no detectable slowing on Task 1 with decreasing SOAs (see Figs. 5 and 8); if anything, performance on Task 1 was faster at the short than the longest SOA.
Why does sensory–motor modality matter?
Sensory–motor modality compatibility strongly influences cognitive control, as has previously been shown in the literatures on dual-task interference (e.g., Hazeltine et al., 2006; Ruthruff, Hazeltine, & Remington, 2006a) and task switching (e.g., Schaeffner et al., 2016; Stephan & Koch, 2011, 2015, 2016). In the present study, it was further demonstrated that sensory–motor modality compatibility facilitates the automatization of dual-task performance through bottleneck bypassing.
Why is this? Stephan and Koch (2010, 2011) proposed natural tendencies to bind certain sensory modalities to certain motor modalities, such as vision to manual responses or audition to vocal responses. These tendencies may originate from a propensity to anticipate the sensory consequences of intentional action (e.g., Greenwald, 1970; Prinz, 1997) or from the existence of modality-specific processing pathways between sensory inputs and motor outputs (Stephan & Koch, 2011). Whatever the exact origin of these tendencies, the mere presentation of a stimulus in a certain sensory modality (e.g., vision) may strongly activate the corresponding motor modality (e.g., hand response). As a consequence, automaticity on the highly practiced task—in the sense of performing the central stage without attention—may have been more readily attained with compatible sensory–motor modalities, because the naturally associated motor modality was strongly activated. In contrast, attaining automaticity on the highly practiced task may have been undermined by the incompatible sensory–motor modalities, because the naturally associated motor modality would need to be deactivated (i.e., a time-consuming additional step) and the less naturally associated, but correct, motor modality to be activated. In other words, incompatible sensory–motor modalities may require central attention to deactivate the natural but wrong motor modality, a barrier to dual-task automatization.
Although the preceding account is plausible, we offer here a more precise mechanistic account of the same phenomenon. This account relies on the assumption of stimulus–response translation that becomes automatic with practice, as well as two additional assumptions about working memory. The first assumption is that there are modality-specific working memory systems—one for sound codes and one for visuospatial codes—known as the phonological loop and the visuospatial sketchpad in Baddeley and Hitch’s (1974) influential model of working memory. The second assumption is that, when performing two tasks, people activate the stimulus code and the corresponding response code for each of the two tasks in working memory. On the basis of these two assumptions, it follows that each task would activate these two codes (i.e., the stimulus code and the corresponding response code) in the same subsystem when the tasks used compatible sensory–motor modalities, but in different subsystems when the tasks used incompatible sensory–motor modalities. For instance, with a configuration of tasks with compatible modalities (i.e., AV and VM), there would be no competition in working memory, because two sound codes would be activated in the phonological loop for an AV task (one for the auditory stimulus and one for the vocal response and its auditory consequences), and two visuospatial codes would be activated in the visuospatial sketchpad for the VM task (one for the visual stimulus and one for the manual response and its visual consequences). It may then arguably be a simple matter to select and activate the stimulus–response codes from each of the working memory subsystems.
But when the tasks have incompatible modalities (i.e., AM and VV), there is a conflict in working memory, because the same subsystem holds codes for both tasks (e.g., with incompatibility pairings, the phonological loop would contain both a stimulus code for the auditory–manual task and a response code for the visual–vocal task). Accordingly, central attention must intervene to sequentially determine for each subsystem which activated code should be selected and executed.
Note that the above account can also easily account for the finding that dual-task costs are stubbornly resistant to practice when both tasks use manual responses (e.g., Ruthruff et al., 2001). In such a case, both responses are represented within the visuospatial working memory system and are quite similar (both indicating fingers).
Is dual-task automatization enabled by response recoding rather than modality compatibility?
A plausible alternative explanation raised during the review process is that the key to bottleneck bypassing is not sensory modality compatibility, as we assumed, but rather semantic congruence. In Experiment 1, participants in the incompatible group may have found the stimuli on the trained task (a or A) to lack congruence with the verbal response (“ONE” or “TWO”). The participants in the compatible group, meanwhile trained on a task mapping these stimuli (a or A) onto manual responses. Although this mapping also lacks congruence, it is possible that these participants were able to recode the manual responses to make them congruent with the stimuli—for instance, recoding them as “lower” and “upper.” So, according to this view, modality compatibility is irrelevant, and instead the key is recoding to produce stimulus–response congruence.
This recoding account works well for Experiment 1 but runs into several problems for Experiment 2. First, the incompatible group in Experiment 2 (when we flipped the modality assignments of the two tasks) trained on a task mapping low- and high-pitched tones onto manual responses. It is not clear why this task would not be amenable to the same recoding strategy hypothesized above—that is, recoding the manual responses as “low” and “high.” Yet participants did not bypass the bottleneck here. So, although the recoding view could potentially explain the differences observed in Experiment 1, it appears to make the wrong prediction for Experiment 2.
Nevertheless, the recoding hypothesis does highlight the fact that we know little about what exactly happens at the semantic level when people learn to efficiently perform a compatible sensory–motor modality task. Does training render the task more ideomotor-compatible, in the sense of increasing semantic congruency between the stimulus and the response through some response recoding? Or does training merely increase the strength of the association between the stimulus code and the response while gradually reducing the reliance on any extraneous codes? These questions merit further investigation.
Is everyone able to bypass the central bottleneck?
We carried out analyses on individual data to determine whether compatible sensory–motor modalities really allow each individual to achieve bottleneck bypassing. Using two analytical tools described in Appendix A (i.e., IRI distribution, size of the PRP effect), we concluded that the majority of the individuals in the compatible-modality group attained bottleneck bypassing (eight individuals out of nine in Exp. 1; 17 out of 20 in Exp. 2). Meanwhile, most of the individuals in the incompatible-modality group were unable to do so (none out of eight in Exp. 1; one out of six in Exp. 2). Pooling these data, 86.2% bypassed when given compatible pairings, but only 7.1% with incompatible pairings. Therefore, the compatibility of the sensory–motor modality pairings appears to have a powerful effect on the ability of individuals to attain dual-task automatization through bottleneck bypassing (i.e., parallel central processing).
Of course, not every single individual with compatibility pairings bypassed, and not every individual with incompatible pairings failed to do so. Individual differences in automaticity would seem to be a fruitful topic for future research. Another qualification is that modality compatibility might not represent an absolute barrier to automatization, but rather a substantial hurdle that could gradually be surmounted with much larger amounts of practice. Consistent with this hypothesis, Ruthruff, Hazeltine, and Remington (2006a, Exps. 3 and 4) reported some evidence for bottleneck bypassing with incompatible modality pairings, but following a much larger amount of practice than was used here (17 dual-task training sessions vs. six single-task training sessions). But because the mean RT1 was not particularly long, a potential latent bottleneck problem cannot entirely be ruled out in their study. In any case, we predict that attaining dual-task automatization through bottleneck bypassing will at least take much longer to develop with incompatible modality pairings, if it can ever develop.
Conclusions
In the present study, we tested whether it is possible to automatize dual-task performance through bottleneck bypassing and sought to further clarify the boundary conditions. We confirmed that bottleneck bypassing is possible and extended it to a new set of tasks. However, we also found that sensory–motor modality compatibility is a key enabler of parallel central processing (i.e., bottleneck bypassing). Whereas the vast majority of the participants with a compatible modality pairing were able to bypass the bottleneck, almost none of those with an incompatible modality pairing were able to do so. Modality compatibility might be necessary to develop automaticity or, at least, greatly facilitate it.
The present findings also provide a valuable clue as to the nature of dual-task automaticity. Here we propose that automaticity occurs most readily when the response is coded within a working memory subsystem (the visuospatial sketchpad or phonological loop) that holds no stimulus or response codes from the other task. When the two tasks activate codes in distinct subsystems (e.g., the phonological loop for the auditory–vocal task and the visuospatial sketchpad for the visual–manual task), there is no competition, and the stimulus–response code ensemble from each subsystem can be selected automatically. When the two tasks both activate codes within the same subsystem (e.g., the phonological loop for the stimulus code of an auditory–manual task and for the response code of a visual–vocal task), however, central attention is needed to determine which code should be selected for response. Further research will be needed to more rigorously test this hypothesis.
In conclusion, note that the studies demonstrating bypassing (Maquestiaux et al., 2008; Ruthruff, Van Selst, et al., 2006b), including the present one, have all used relatively rapidly performed tasks (taking much less than 1 s, even before any practice) involving a small number of stimulus categories and responses per task (typically just two or three). Future research will be needed to rigorously determine whether bottleneck bypassing can also occur for more complex tasks of the sort frequently encountered in the real world, such as driving or typing or playing a musical instrument.
Notes
Note that moving the hands and fingers also leads to tactile feedback, so a tactile–manual task would also have been modality-compatible.
Maquestiaux et al. (2008) required an unusually large sample size (N = 20) because their goal was to assess individual differences in the ability to bypass the central bottleneck.
The sounds are available at https://drive.google.com/file/d/0B5aeKacjU11aVGJnZlpRSzdCR2s/view.
Block feedback regarding speed was presented solely for Task 1 in order to subtly encourage the participants to prioritize Task-1 processing. By doing so, interference, if any, would show up primarily on Task 2, which would greatly simplify the model predictions. It would also deter response grouping, since grouping would specifically elevate RT1.
We followed previous studies (Maquestiaux et al., 2013; Maquestiaux et al., 2008; Maquestiaux et al., 2010; Ruthruff, Van Selst, et al., 2006b) in excluding the first dual-task session. The results from this session were overall comparable to those reported on the second and third sessions combined. The results for Session 1 showed a pattern similar to that reported below for Sessions 2–3, except for being slightly slower overall (as one would expect). The PRP effects for Session 1 and Sessions 2–3 were 266 versus 236 ms with an AV–VM design, t(8) ≤ 1, and 608 versus 526 ms with an AM–VV design, t(7) = 2.37, p = .05; response reversal rates at the shortest SOA were 63.3% versus 48.4% with an AV–VM design, t(8) = 1.52, p = .166, and 4.65% versus 1.0% with an AM–VV design, t(7) = 2.71, p ≤ .05.
All control participants were native French speakers and undergraduate students in psychology at the Université Bourgogne Franche-Comté, Besançon, France.
Here we provide additional descriptive statistics for the two control experiments. For the compatible-modality group (n = 10), the mean RT1 was 898 ms, the mean ER1 was 1.93%, the mean RT2 at the longest SOA (i.e., when there was no temporal overlap between the two tasks) was 539 ms, and the mean ER2 was 3.07%. For the incompatible-modality group (n = 10), the mean RT1 was 820 ms, the mean ER1 was 2.31%, the mean RT2 at the longest SOA was 682 ms, and the mean ER2 was 0.60%. The shorter mean RT1 for the incompatible group than for the compatible group (820 vs. 898 ms) may have stemmed from slight differences in speed between the two groups and, following Eq. 2 of the central bottleneck, this difference in RT1s may help explain why the amount of PRP interference was slightly smaller for the incompatible than for the compatible group (592 vs. 626 ms).
The manipulation of spatial compatibility between the Task-1 visual stimulus and the corresponding response finger was included in Maquestiaux et al. (2008) to test a prediction of bottleneck bypassing: incomplete carryover of Task-1 stimulus–response compatibility effects to Task-2 RTs at the shortest SOA. Confirming the prediction, the very large compatibility effect on Task 1 itself (172 ms) carried over to RT2 at the shortest SOA by only 39.5%.
After removal of these trials, the two modality groups showed comparable RTs at baseline (i.e., at the long SOA) on both the Task-1 RT [576 ms for the compatible-modality group and 537 ms for the incompatible-modality group; t(24) ≤ 1] and the Task-2 RT [360 ms for the compatible-modality group and 316 ms for the incompatible-modality group; t(24) = 1.27, p = .214].
The higher percentage of trials removed in the compatible modality group relative to the incompatible modality group likely stems from a higher susceptibility to external noise by the voice key system used for Maquestiaux et al.’s (2008) compatible-modality group (Voice Connexion System, Microsoft Speech SDK Version 5.1), relative to the voice key used for the incompatible modality group (voice key system integrated within the SR Box).
The results from the first dual-task session were overall comparable to those reported on the second and third sessions combined. Our key indicators (PRP effect, response reversal at the shortest SOA) did not deviate much for Session 1 versus Sessions 2–3: PRP effects of 226 versus 194 ms with a VM–AV design, t(19) = 1.56, p = .134, and of 493 versus 497 ms with a VV–AM design, t(5) ≤ 1; response reversal rates at the shortest SOA of 42.86% versus 52.06% with a VM–AV design, t(19) = – 2.25, p ≤ .05, and of 11.71% versus 5.69% with a VV–AM design, t(5) = 1.80, p = .131.
The most obvious explanation of why RTs were faster on the AM than on the AV task is that there were slight differences in speed between the two groups.
All control participants were native French speakers and undergraduate students in psychology at the Université Bourgogne Franche-Comté, Besançon, France.
Here we provide descriptive statistics about the main results from the two control experiments. For the compatible-modality group (n = 10), the mean RT1 was 681 ms, the mean ER1 was 4.57%, the mean RT2 at the longest SOA was 720 ms, and the mean ER2 was 5.59%. For the incompatible-modality group (n = 10), the mean RT1 was 732 ms, the mean ER1 was 1.23%, the mean RT2 at the longest SOA was 522 ms, and the mean ER2 was 4.36%.
References
Baddeley, A. D., & Hitch, G. J. (1974). Working memory. In G. H. Bower (Ed.), The psychology of learning and motivation: Advances in research and theory (Vol. 8., pp. 47–89). New York, NY: Academic Press. https://doi.org/10.1016/S0079-7421(08)60452-1
Bertelson, P., & Tisseyre, F. (1969). Refractory period of c-reactions. Journal of Experimental Psychology, 79, 122–128.
Borger, R. (1963). The refractory period and serial choice reactions. Quarterly Journal of Experimental Psychology, 15, 1–12.
Greenwald, A. G. (1970). Sensory feedback mechanisms in performance control: With special reference to the ideo-motor mechanism. Psychological Review, 77, 73–99.
Greenwald, A. G., & Shulman, H. G. (1973). On doing two things at once: II. Elimination of the psychological refractory period effect. Journal of Experimental Psychology, 101, 70–76.
Halvorson, K. M., Ebner, H., & Hazeltine, E. (2013). Investigating perfect timesharing: The relationship between IM-compatible tasks and dual-task performance. Journal of Experimental Psychology: Human Perception and Performance, 39, 413–432.
Halvorson, K. M., & Hazeltine, E. (2015). Do small dual-task costs reflect ideomotor compatibility or the absence of crosstalk? Psychonomic Bulletin & Review, 22, 1403–1409. https://doi.org/10.3758/s13423-015-0813-8
Hazeltine, E., Ruthruff, E., & Remington, R. W. (2006). The role of input and output modality pairings in dual-task performance: Evidence for content-dependent central interference. Cognitive Psychology, 52, 291–345.
Hazeltine, E., Teague, D., & Ivry, B. (2002). Simultaneous dual-task performance reveals parallel response selection after practice. Journal of Experimental Psychology: Human Perception and Performance, 28, 527–545. https://doi.org/10.1037/0096-1523.28.3.527
Hazeltine, E., & Wifall, T. (2011). Searching working memory for the source of dual-task costs. Psychological Research, 75, 466–475.
Hommel, B., Müsseler, J., Aschersleben, G., & Prinz, W. (2001). The Theory of Event Coding (TEC): A framework for perception and action planning. Behavioral and Brain Sciences, 24, 849–878, disc. 878–937. https://doi.org/10.1017/S0140525X01000103
Jong, R. de (1993). Multiple bottlenecks in overlapping task performance. Journal of Experimental Psychology: Human Perception and Performance, 19, 965–980. https://doi.org/10.1037/0096-1523.19.5.965
Karlin, L., & Kestenbaum, R. (1968). Effects of number of alternatives on the psychological refractory period. Quarterly Journal of Experimental Psychology, 20, 167–178.
Levy, J., & Pashler, H. (2001). Is dual-task slowing instruction dependent. Journal of Experimental Psychology: Human Perception and Performance, 27, 862–869.
Loftus, G. R., & Masson, M. E. J. (1994). Using confidence intervals in within-subject designs. Psychonomic Bulletin & Review, 1, 476–490. https://doi.org/10.3758/BF03210951
Maquestiaux, F., Didierjean, A., Ruthruff, E., Chauvel, G., & Hartley, A. A. (2013). Lost ability to automatize task performance in old age. Psychonomic Bulletin & Review, 20, 1206–1212.
Maquestiaux, F., Laguë-Beauvais, M., Bherer, L., & Ruthruff, E. (2008). Bypassing the central bottleneck after single-task practice in the psychological refractory period paradigm: Evidence for task automatization and greedy resource recruitment. Memory & Cognition, 36, 1262–1282. https://doi.org/10.3758/MC.36.7.1262
Maquestiaux, F., Laguë-Beauvais, M., Ruthruff, E., Hartley, A. A., & Bherer, L. (2010). Learning to bypass the central bottleneck: Declining automaticity with advancing age. Psychology and Aging, 25, 177–192.
Mechsner, F., Kerzel, D., Knoblich, G., & Prinz, W. (2001). Perceptual basis of bimanual coordination. Nature, 414, 69–73.
Meyer, D. E., & Kieras, D. E. (1997a). A computational theory of executive cognitive processes and multiple-task performance: Part 1. Basic mechanisms. Psychological Review, 104, 3–65. https://doi.org/10.1037/0033-295X.104.1.3
Meyer, D. E., & Kieras, D. E. (1997b). A computational theory of executive cognitive processes and multiple-task performance: Part 2. Accounts of psychological refractory-period phenomena. Psychological Review, 104, 749–791. https://doi.org/10.1037/0033-295X.104.4.749
Pashler, H. (1984). Processing stages in overlapping tasks: Evidence for a central bottleneck. Journal of Experimental Psychology: Human Perception and Performance, 10, 358–377. https://doi.org/10.1037/0096-1523.10.3.358
Pashler, H. (1994). Dual-task interference in simple tasks: Data and theory. Psychological Bulletin, 116, 220–244. https://doi.org/10.1037/0033-2909.116.2.220
Pashler, H., & Harris, C. (2012). Is the replication crisis overblown? Three arguments examined. Perspectives on Psychological Science, 7, 531–536.
Pashler, H., & Johnston, J. C. (1989). Chronometric evidence for central postponement in temporally overlapping tasks. Quarterly Journal of Experimental Psychology, 41A, 19–45.
Prinz, W. (1990). A common coding approach to perception and action. In O. Neumann & W. Prinz (Eds.), Relationships between perception and action (pp. 167–201). Berlin: Springer.
Prinz, W. (1997). Perception and action planning. European Journal of Cognitive Psychology, 9, 129–154. https://doi.org/10.1080/713752551
Ruthruff, E., Hazeltine, E., & Remington, R. W. (2006). What causes residual dual-task interference after practice? Psychological Research, 70, 494–503.
Ruthruff, E., Johnston, J. C., & Remington, R. W. (2009). How strategic is the central bottleneck: Can it be overcome by trying harder? Journal of Experimental Psychology: Human Perception and Performance, 35, 1368–1384.
Ruthruff, E., Johnston, J. C., & Van Selst, M. (2001). Why practice reduces dual-task interference. Journal of Experimental Psychology: Human Perception and Performance, 27, 3–21. https://doi.org/10.1037/0096-1523.27.1.3
Ruthruff, E., Johnston, J. C., Van Selst, M., Whitsell, S., & Remington, R. (2003). Vanishing dual-task interference after practice: Has the bottleneck been eliminated or is it merely latent? Journal of Experimental Psychology: Human Perception and Performance, 29, 280–289. https://doi.org/10.1037/0096-1523.29.2.280
Ruthruff, E., Van Selst, M., Johnston, J. C., & Remington, R. W. (2006). How does practice reduce dual-task interference: Integration, automatization, or just stage-shortening? Psychological Research, 70, 125–142.
Schaeffner, S., Koch, I., & Philipp, A. (2016). The role of sensory–motor modality compatibility in language processing. Psychological Research, 80, 212–223.
Schumacher, E. H., Lauber, E. J., Glass, J. M., Zurbriggen, E. L., Gmeindl, L., Kieras, D. E., & Meyer, D. E. (1999). Concurrent response-selection processes in dual-task performance: Evidence for adaptive executive control of task scheduling. Journal of Experimental Psychology: Human Perception and Performance, 25, 791–814. https://doi.org/10.1037/0096-1523.25.3.791
Schumacher, E. H., Seymour, T. L., Glass, J. M., Fencsik, D. E., Lauber, E. J., Kieras, D. E., & Meyer, D. E. (2001). Virtually perfect time sharing in dual-task performance: Uncorking the central cognitive bottleneck. Psychological Science, 12, 101–108.
Stephan, D. N., & Koch, I. (2010). Central cross-talk in task switching: Evidence from manipulating input–output modality compatibility. Journal of Experimental Psychology: Learning, Memory, and Cognition, 36, 1075–1081. https://doi.org/10.1037/a0019695
Stephan, D. N., & Koch, I. (2011). The role of input–output modality in task switching. Psychological Research, 75, 491–498.
Stephan, D. N., & Koch, I. (2015) Tactile stimuli increase effects of modality compatibility in task switching. Experimental Psychology, 62, 276–284. https://doi.org/10.1027/1618-3169/a000291
Stephan, D. N., Koch, I. (2016). Modality-specific effects on crosstalk in task switching: Evidence from modality compatibility using bimodal stimulation. Psychological Research, 80, 935–943. https://doi.org/10.1007/s00426-015-0700-y
Van Selst, M., Ruthruff, E., & Johnston, J. C. (1999). Can practice eliminate the Psychological Refractory Period effect? Journal of Experimental Psychology: Human Perception and Performance, 25, 1268–1283. https://doi.org/10.1037/0096-1523.25.5.1268
Watson, J. M., & Strayer, D. L. (2010). Supertaskers: Profiles in extraordinary multitasking ability. Psychonomic Bulletin & Review, 17, 479–485. https://doi.org/10.3758/PBR.17.4.479
Welford, A. T. (1952). The “psychological refractory period” and the timing of high-speed performance: A review and a theory. British Journal of Psychology, 43, 2–19.
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix A: Evidence of individuals able to bypass the central bottleneck in Experiment 1
The main analyses reported above indicated that the compatible-modality group bypassed, overall, and the incompatible-modality group bottlenecked, overall. Here we zoom in on each group and consider the possibility of mixtures within each group. Figure 11 shows a plot of the PRP effect (top panel) and a plot of response reversal rates at the 15-ms SOA (bottom panel) during the PRP test sessions, as a function of mean RT1, where each point corresponds to one participant. Roughly consistent with sharp individual differences, the two panels show diffuse scatterplots.

Psychological refractory period (PRP) effects and percentages of response reversals at the 15-ms stimulus onset asynchrony (SOA), plotted against the mean Task-1 response time (RT1) for each individual in Experiment 1. The filled triangles represent the individual participants from the compatible-modality group, and the open triangles represent the individual participants from the incompatible-modality group
To assess individual differences in the ability to automatize entire task performance, we used the same two analytical tools (i.e., interresponse intervals, or IRIs, with a cutoff of ±75 ms, and PRP effects) that were employed in previous studies (Maquestiaux et al., 2013; Maquestiaux et al., 2008; Maquestiaux et al., 2010; Ruthruff, Van Selst, et al., 2006b). Note that the IRI—the time that elapses between the Task-1 and Task-2 responses—is simply the continuous version of the categorical “response reversal” rate discussed above (i.e., negative IRIs are response reversals). The continuous version is more complicated but adds extra leverage when trying to classify individual participants.
IRIs
If Task-2 processing is automatic, in the sense of bottleneck bypassing, participants should emit Task-2 responses before Task-1 responses on a high proportion of the trials at the shortest SOA; this reversed response order (i.e., R2 followed by R1) should result in a broad peak of negative IRIs (often less than – 75 ms). But if Task-2 processing is nonautomatic, in the sense of bottlenecking, Task-1 responses should routinely precede Task-2 responses at the shortest SOA; this response order (i.e., R1 followed by R2) should result in a broad peak of positive IRIs (often more than + 75 ms). Another possibility is response grouping at the shortest SOA (i.e., emitting both responses as a couplet by withholding one of them until the other is ready); this grouping strategy should result in a sharp peak of IRIs located around 0 ms (often between – 75 and + 75 ms). When we applied these criteria, Fig. 12 shows how we tentatively categorized the participants as bottleneckers, bypassers, and bypass groupers in the compatible-modality group (top panel) and the incompatible-modality group (bottom panel). This categorization, with a majority of bypassers and bypass groupers for the compatible-modality group (eight out of nine), but with 100% bottleneckers for the incompatible-modality group, was confirmed by the analyses shown below for the other analytical tool (i.e., PRP effects).

Histograms of interresponse intervals (IRIs) at the 15-ms stimulus onset asynchrony (SOA) for the participants categorized as bypassers, bottleneckers, and bypass groupers for the compatible-modality group (top panel) and for the incompatible-modality group (bottom panel) in Experiment 1. The range of IRIs from – 75 to + 75 ms, represented by the two vertical dashed lines, indicates response grouping
PRP effects
For the compatible-modality group, the PRP effects were small for the four bypassers (M = 148 ms, ranging from 77 to 246 ms) and intermediate for the four bypass groupers (M = 290 ms, ranging from 204 to 343 ms). The reason for categorizing the four participants as bypass groupers rather than bottleneck groupers is as follows. First, consider the possibility that they experienced a bottleneck and then grouped their responses. At the short SOAs, they would need to withhold the Task-1 response for a substantial period of time in order to group the Task-1 and Task-2 responses as a couplet. Thus, RT1 should be substantially elevated at short relative to long SOAs. Another possibility is that the participants bypassed the bottleneck and then grouped responses. Following this possibility, it should be necessary at the short SOAs to withhold the Task-2 response for a substantial period of time, in order to group the Task-1 and Task-2 responses as a couplet. Thus, RT1 should not be much longer at short relative to long SOAs. Indeed, among the four individuals categorized as bypass groupers, RT1 was only 20 ms longer at the two shortest SOAs (M = 578 ms) than at the longest SOA (558 ms). The negligible RT1 slowing supports bypassing grouping over bottleneck grouping. Note that bypassing the bottleneck and then withholding the Task-2 response also neatly explains the modest PRP effects. Turning now to the participants from the incompatible-modality group, the data appear much more homogeneous. Consistent with bottlenecking, all had a high percentage of IRIs above 75 ms (M = 97.9%, ranging from 93.3% to 100%), and all showed very large PRP effects (M = 526 ms, ranging from 407 to 726 ms). Thus they appear to all be bottleneckers.
Appendix B: Evidence of individuals able to bypass the central bottleneck in Experiment 2
As in Appendix A, we zoom in on each group and consider the possibility of mixtures among participants within the compatible-modality group and within the incompatible-modality group in Experiment 2. Figure 13 shows a plot of the PRP effect (top panel) and a plot of response reversal rates at the 15-ms SOA (bottom panel) during the PRP test sessions, as a function of mean RT1, where each point corresponds to one participant. As in Experiment 1, the two panels show diffuse scatterplots that are suggestive of sharp individual differences.

Psychological refractory period (PRP) effects and percentages of response reversals at the 15-ms stimulus onset asynchrony (SOA), plotted against the mean Task-1 response time (RT1) for each individual in Experiment 2. The filled triangles represent the individual participants from the compatible-modality group, and the open triangles represent the individual participants from the incompatible-modality group
We used the same analytical tools as in Appendix A (i.e., IRIs and PRP effects) to determine the processing mode for each individual participant.
IRIs
When applying the same criteria as in Appendix A (i.e., IRIs of less than – 75 ms as evidence of bypassing, IRIs of more than + 75 ms as evidence of bottlenecking, and IRIs between – 75 and + 75 ms as evidence of grouping), Fig. 14 shows how we categorized the participants as bottleneckers and bypass groupers for the two modality groups. We found a majority of bypass groupers for the compatible-modality group (17 out of 20) but a majority of bottleneckers for the incompatible-modality group (five out of six). This categorization was confirmed by subsequent analyses using PRP effects (see below).

Histograms of interresponse intervals (IRIs) at the 15-ms stimulus onset asynchrony (SOA) for the participants categorized as bottleneckers and bypass groupers for the compatible-modality group (top panel) and the incompatible-modality group (bottom panel) in Experiment 2. The range of IRIs from – 75 to + 75 ms, represented by the two vertical dashed lines, indicates response grouping
PRP effects
For the compatible-modality group, the 17 bypass groupers showed small PRP effects (M = 121 ms, ranging from – 4 to 361 ms). They were categorized as bypass groupers, rather than bottleneck groupers, because RT1 was flat across SOAs (555 ms at the 15-ms SOA, 565 ms at the 65-ms SOA, and 574 ms at the longest SOA) (for more details on the logic, see Appx. A). In short, a vast majority of the participants in the compatible-modality group (i.e., 17 out of 20 participants) were able to bypass the central bottleneck. Turning now to the incompatible-modality group, the PRP was large overall for the five bottleneckers (M = 541 ms, ranging from 490 to 599 ms) but relatively small for one participant (PRP effect = 273 ms). This one participant can be categorized as a bypass grouper on the basis of a relatively high percentage of IRIs within the narrow range from – 75 to 75 ms (38.71%), combined with no RT1 increase at the shortest SOA (490 ms) as compared to the longest SOA (578 ms) and a modest PRP effect. However, the remaining five of the six participants from the incompatible-modality group were unable to bypass the central bottleneck.
Rights and permissions
About this article

Cite this article
Maquestiaux, F., Ruthruff, E., Defer, A. et al. Dual-task automatization: The key role of sensory–motor modality compatibility. Atten Percept Psychophys 80, 752–772 (2018). https://doi.org/10.3758/s13414-017-1469-4
Published:
Issue Date:
DOI: https://doi.org/10.3758/s13414-017-1469-4