
Abstract
One commonly perceives whether a visible object will afford grasping with one hand or with both hands. In experiments in which differently sized objects of a fixed type are presented, the transition from using one of these manual modes to the other depends on the ratio of object size to hand span and on the presentation sequence, with size increasing versus decreasing. Conventional positive hysteresis (i.e., a larger transition ratio for the increasing sequence) can be accommodated by the order parameter dynamics that typify self-organizing systems (Lopresti-Goodman, Turvey, and Frank, Attention, Perception, & Psychophysics 73:1948–1965, 2011). Here we identified and addressed conditions of unconventional negative hysteresis (i.e., a larger transition ratio for the decreasing sequence). They suggest a second control parameter in the self-organization of affordance perception, one that is seemingly regulated by inhibitory dynamics occurring in the agent–task–environment system. Our experimental results and modeling extend the investigation of affordance perception within dynamical systems theory.
Similar content being viewed by others


Definitions of affordance and hysteresis
As a first approximation, Gibson’s (1979/1986) concept of affordance can be defined as follows: An object affords a given activity for an agent on a specific occasion (or in a specific setting) if and only if the object and the agent are mutually compatible on dimensions of relevance to the activity (Petrusz & Turvey, 2010; Shaw et al. 1982; Turvey & Shaw, 1979). In the present research, the affordance under discussion is “graspable.” For a human in reach of a block of wood, the block affords the activity of grasping with one hand if and only if a mutual compatibility of relevance to grasping holds between the agent’s dimensions (e.g., hand span) and the object’s dimensions (e.g., width).Footnote 1
When an object does not afford the activity of unimanual grasping, it might still afford the activity of bimanual grasping, or it might afford no manual grasping activity at all. In the research presented here, the notion of occasion or setting refers to a particular “history” of the object—either one of systematic increase in object size, from significantly less to significantly greater than hand size, or one of systematic decrease in object size, from significantly greater to significantly less than hand size. The two “histories” are, equivalently, two different initial conditions: either beginning with unimanually graspable objects, or beginning with objects that are either not graspable or are graspable bimanually. Of primary concern in the reported experiment was the dependence of the grasping activity on whether the sequence of object presentation began with an object graspable with one hand or with an object not graspable with one hand.
The standard term for the dependence of a physical system’s current activity on its history is hysteresis. The magnetization of a given material, for example, depends not only on the magnetic field to which the material is presently exposed, but also on the magnetic fields to which it has previously been exposed. The dependency is usually of a specific form: For a sequence of increasing and then decreasing field magnitudes, the onset of magnetizing is at a larger field magnitude than the onset of demagnetizing. It has become necessary to refer to this usual historic effect as positive hysteresis because of contemporary (and much less frequent) observations of the reverse—namely, the onset of magnetizing occurring at a smaller magnetic field magnitude than the onset of demagnetizing, a case of negative hysteresis (see, e.g., Kochereshko et al., 1995). Negative hysteresis has come under investigation in a variety of systems, both physical and biological. Focal issues have included the degree to which it is like positive hysteresis—for example, whether the same principles and the same parameters are involved, and if so, whether they are involved in the same way (e.g., Case et al., 1995; S.-H. Choi et al., 1999; Garshelis & Cuseo, 2009; Lorente & Davidenko, 1990; Pisarchik et al., 2001).
For both kinds of hysteresis, the key is the opportunity to occupy more than one possible state. For a human, the possible manual grasping states, as noted, are unimanual, bimanual, and neither. A person can index these possible states in a number of ways, most prominently by selective nonverbal activity (e.g., grasping with one hand) or selective verbal activity (e.g., uttering “one hand”). As will be revealed in the next section, for the affordance “graspable,” the dependence of grasping on whether the sequence (history) of object presentation begins (a) with objects graspable with one hand or (b) with objects not graspable with one hand is seemingly conditional on the manner of indexing “graspable.”
Dynamical challenges in preview
The transitions between afforded behaviors exhibit some key features of a dynamical systemFootnote 2 (Fitzpatrick et al., 1994; Hirose & Nishio, 2001; Lopresti-Goodman et al., 2009; Richardson et al., 2007; van der Kamp et al., 1998; van Rooij et al., 2000). For example, the different types of activities exhibited (e.g., unimanual or bimanual grasping) are the system’s modes. The stable or ordered states of the modes, expressed typically by amplitudes (e.g., percentages of unimanual or bimanual grasping), may be considered order parameters (Frank et al., 2009). They are stable, in the sense of remaining unchanging over a range of increases or decreases in one or more so-called control parameters. In affordance experiments, a dimensionless ratio, or π-number (e.g., object size/hand span), acts as a control parameter (e.g., Fitzpatrick et al., 1994; Lopresti-Goodman et al., 2011; van der Kamp et al., 1998; Warren, 1984). This is a parameter that induces a spontaneous transition in the order parameter—that is, a spontaneous transition from one stable state to another—when its magnitude crosses a critical value, but not otherwise (cf. Haken, 1988; Kelso, 1995; Strogatz, 1994). When measurement resolution permits, the transition is anticipated, and the instability made visible, by amplification of the fluctuations of the order parameter (see Kelso, 1995, for examples in movement coordination). In the present research, the system characterized by the order parameter is defined by the mutual compatibility relation of participant and object with respect to the activity of grasping. For both an ascending history (increasing object size) and a descending history (decreasing object size), the order of the mutual compatibility undergoes, at critical values, a discontinuous change indexed by the categorical states of the order parameter. For the affordance “graspable,” the discontinuous changes are from 100 % unimanual to 100 % bimanual to 100 % nonmanual on the occasion of increasing object size, and in reverse on the occasion of decreasing object size.
We can calculate a value for the amount of hysteresis exhibited by the order parameter as the difference between two critical control-parameter values—for example, that of the π-number in the ascending series, marking the boundary between unimanual and bimanual, and the π-number in the descending series, marking the boundary between bimanual and unimanual. The direction and amount of hysteresis that manifests in an experiment has been shown to depend on how “graspable” is reported. When the report is a selective nonverbal activity (e.g., grasping and moving an object or stepping onto a surface), positive hysteresis (the ascending π-number exceeds the descending π-number) most often results (Lopresti-Goodman et al., 2009; Lopresti-Goodman et al., 2011; Richardson et al., 2007). When the report is a selective verbal activity (e.g., “two hands” or “step-over-able”), negative hysteresis (the ascending π-number is less than the descending π-number) typically occurs (Fitzpatrick et al., 1994; Hirose & Nishio, 2001; Pufall & Dunbar, 1992; Richardson et al., 2007; see also Tuller et al., 1994). Figure 1 summarizes in schematic form the “graspable” results of Richardson et al. for selective nonverbal activity (panel a) and selective verbal activity (panel b).Footnote 3

A schematic illustrating the reversal of transition points in the conditions of ascending trials (α c,2; solid line) and descending trials (α c,1; dashed line) in Richardson et al.’s (2007) selective verbal activity (“perception”) condition (a) and selective nonverbal activity (“action”) condition (b)
Some proposed explanations for negative hysteresis in human perception–action are that selective verbal behavior may promote (a) explicit prediction (Richardson et al., 2007), (b) an emphasis on optimal π-numbers (corresponding to preferred regions of behavior) rather than critical π-numbers (reflecting the limits of an individual’s action capabilities; Mark et al., 1997; Warren, 1984), and/or (c) a deemphasis of exproprio- and proextero-specific information (that which undergirds controlled activity in surroundings cluttered at multiple length scales;Footnote 4 e.g., Fitzpatrick et al., 1994; Hirose & Nishio, 2001; Lopresti-Goodman et al., 2009; Lopresti-Goodman et al., 2011; Pufall & Dunbar, 1992; Richardson et al., 2007). With respect to Point c, it is of some significance to note that, in those experiments generating negative hysteresis or critical points, the specifics of the experiments were such as to hold distinct the perceptual and performatory aspects of the task. This separation was brought about by either (1) prohibiting participants from engaging in the potentially afforded action (Fitzpatrick et al., 1994; Hirose & Nishio, 2001; Pufall & Dunbar, 1992; Richardson et al., 2007) or (2) requiring participants to engage in the action at a very slow, almost unnatural, pace (Lopresti-Goodman et al., 2009; Lopresti-Goodman et al., 2011). An example of Procedure 1 is Experiment 2 of Fitzpatrick et al. (1994). There, participants “probed” a sloped surface to address the question of whether the slope afforded standing on, by either looking at the sloped surface or striking the sloped surface with a stick. At no point in the course of the experiment did the participants perform the activity of standing on the sloped surface. An experiment by Lopresti-Goodman et al. (2009) provides an example of Procedure 2: The time during which planks to be grasped and carried were visible prior to grasping with one or two hands was protracted, rendering a nonverbal report of graspable mode an implicit verbal report of graspable mode.
Following Gibson (1966, 1979/1986), perception–action can be said to involve two kinds of cycles (Turvey et al., 1990; see Fig. 2). One kind comprises perceiving and performatory activity, and the other kind comprises perceiving and exploratory activity of varied forms (within the general classes of looking, listening, touching, tasting, and smelling). Typically, a single cycle of perceiving and performing will nest several, and possibly many, cycles of perceiving and exploring.

The two kinds of cycles comprising perception–action
The performatory distinction of selective verbal activity and selective nonverbal activity has consequences for exploratory activity, for the adjusting and moving of the organs of sensitivity (Gibson, 1966)—for example, when and where the eyes are focused—and when and how the body orients to the potentially graspable object. When experimental designs or instructions to participants minimize the performatory aspect of the perceiving–performing cycle, the opportunity and/or ability to explore and detect information about task- or goal-relevant capabilities may also be minimized (Heft, 1993; Mark et al., 1990; Oudejans et al., 1996; Richardson et al., 2007).
An overview of grasping transition (GT) modeling
The GT model belongs to a general class of models for self-organizing and multistable pattern-forming systems that can be found in physics and the life sciences (see Haken, 1991, 1996). The patterns (viz. modes) emergent in such systems can be stationary or spatiotemporal. In our context, we are concerned with two patterns of spatiotemporal activity—grasping an object with one hand, and grasping an object with two hands. The concern is from the adjectival perspective of graspable, whether an object can be grasped with one hand or only with two hands.
Each of these two modes of grasping has an amplitude (a percentage of use) that is dependent on object size. The amplitudes are interpreted as the order parameters of the modes. This follows from a mathematical perspective in which amplitudes are the macroscopic variables that (1) characterize the state of the mode, (2) are affected by the variables that describe the mode’s (microscopic) components, and (3) in turn, affect the mode’s (microscopic) components. For actual grasping and for indicating “graspable” verbally, a particular mode is manifest if the corresponding mode amplitude (the order parameter) reaches a critical threshold value.
Figure 3 is a schematic of the GT model in its fundamental (nonextended) form. The figure depicts the mode amplitudes under linear influences that excite the two modes and nonlinear influences that inhibit them. The strength of a mode’s activation under linear influences—its degree of availability—is measured by the parameters λ 1 (for unimanual) and λ 2 (for bimanual). Positive λ means that, initially, mode amplitude grows—or, synonymously, that the mode becomes more available—as an exponential function of rate λ. The strength of each mode’s inhibition of the other under nonlinear influences (a nonlinear coupling) is measured by the parameter g. A necessary (but not sufficient) condition for a bistable domain of g is that the effect of other-inhibiting influences (cross-inhibition) exceeds the effect of the self-inhibiting influences. For modeling purposes, the strength of the self-inhibiting influences can be normalized to 1 without loss of generality (Lopresti-Goodman et al., 2011). Given this normalization, the parameter g must be larger than 1 to satisfy the necessary bistability condition.

Schematic representation of the GT model in its fundamental form. The amplitudes (order parameters) of the unimanual (U) and bimanual (B) modes are subjected to various linear and nonlinear influences (white arrows and black/gray arrows, respectively). Linear influences are excitatory and nonlinear influences are inhibitory, as indicated by the plus and minus signs. See the text for details
Modeling negative hysteresis
Negative hysteresis presents a fundamental challenge (in whatever branch of science it is made manifest): It cannot be modeled by the bistable, single-control-parameter dynamics of Fig. 3. The logical argument for this central claim is given in Appendix A. Here, we sketch the generic form that a dynamical-systems model must have in order to account for negative hysteresis.
This generic model exhibits two key parameters, μ and ν (rather than a single control parameter), that determine transitions between the two states under consideration. The first parameter, μ, may be identified with a conventional control parameter that can be manipulated by the experimenter. The second parameter, ν, may be regarded as a pseudo-control parameter, because as we will argue below, it is internally regulated by the dynamical system. In the context of grasping transitions, the μ parameter corresponds to relative object size, whereas the ν parameter corresponds to a quantity entering into the growth rates λ 1 and λ 2 (availability parameters) of the fundamental bistable model shown in Fig. 3. We now proceed to the generic case illustrated in Fig. 4a.

a Schematic illustration of the response of a dynamical system that exhibits two states, A and B, and is subject to negative autoregulation (cf. Figs. 1 and 4 in Sivaprakasam et al., 2000). The control parameter μ is externally controlled and scaled up and down. The second variable ν is regulated by the system itself in response to changes in μ. The stability of states A and B depends on both variables μ and ν. The negative autoregulation of ν results in a “round trip” in the two-dimensional space spanned by μ and ν. When mapping the stability of states A and B only on the horizontal axis described by μ, negative hysteresis is observed. b Modeling with respect to the activity of grasping Y in a unimanual or bimanual mode, represented as YU and YB, respectively. The control parameter α is the externally manipulated parameter (e.g., μ), and the parameter ΔL (the difference between the offset parameters L 1 and L 2; see Table 1) is autoregulated (e.g., ν) with changes in α. The stabilities of YU and YB depend on both α and ΔL. Negative autoregulation of ΔL results in the “round trip” in the two-dimensional space. If states YU and YB are only mapped to α, negative hysteresis is observed. The natures of α and ΔL in the context of the present experiment are spelled out in detail in the modeling sections below
The two-dimensional parameter space spanned by the aforementioned key parameters μ and ν is divided into two monostable domains, A and B (e.g., unimanual and bimanual grasping, respectively). The critical boundary line dividing these two domains may assume a general form. For the sake of simplicity, we express it as a straight (dashed) line in the parameter space of Fig. 4a. With increasing μ, the A attractor would become unstable at a critical value μ c,2. Further increases in μ would take the dynamical system farther away from the bifurcation line. However, in the case of a system exhibiting negative hysteresis, the system tends to remain close to the bifurcation line (i.e., it resists deviations from the vicinity of the bifurcation). This occurs by virtue of increases in ν.
The two key points to make here are (a) that the second parameter is autoregulated and not externally manipulated, and (b) that the nature of the autoregulation is negative and “attractor weakening.” Consider the B attractor. Increasing μ would make it more stable, because it would take the dynamical system farther away from the bifurcation line. The autoregulation, however, acts in the opposite direction. In doing so, it contributes to a destabilization of the B attractor. Said differently, the autoregulation of the second parameter ν counters the μ-induced emergence of the A attractor or weakens the strength of the A attractor.
As is depicted in Fig. 4a, when scaling μ downward, the bifurcation from B to A will occur at a relatively high critical value μ c,1. A further scaling down of μ would again take the system away from the bifurcation line and would increase the strength of A. The negative autoregulation, however, forces the dynamical system to remain relatively close to the bifurcation line. It does so through decreases in ν.
In short, negative hysteresis should be understood as a “round trip” in a space of two control parameters, where the round trip is characterized by negative autoregulation (i.e., the tendency to remain close to the bifurcation line). In contrast, positive hysteresis is a simple return trip in a one-control-parameter space. The sections that follow transform Fig. 4a into Fig. 4b, the proposed two-control-parameter space for the affordance “graspable.”
Extending the grasping transition (GT) model to accommodate negative hysteresis
The GT model, advanced by Frank et al. (2009), addresses the dynamics of the affordance “graspable” with a single control parameter. It successfully accounts for experimentally observed positive hysteresis (Lopresti-Goodman et al., 2011). Here we extend the GT model to account, additionally, for negative hysteresis.
To facilitate the model extension, and the subsequent development of the experiment and its results, we introduce a notation for the affordance schema developed previously (Shaw et al., 1982; Turvey & Shaw, 1979): An object X affords activity Y for an agent Z on the occasion O if and only if X and Z are mutually compatible on dimensions of relevance to Y. Unimanual, bimanual, and nonmanual grasping activity Y (of either the selective nonverbal or selective verbal form) are symbolized as YU, YB, and YNULL, respectively, and the occasions of systematic increase and systematic decrease in the size of the object X are symbolized O+ and O−, respectively. Let ◊ symbolize mutual compatibility;Footnote 5 then, the system under inquiry in the present modeling and research is (X◊Z)Y—the mutual compatibility of X and Z with respect to Y. To facilitate the reader’s comprehension of the steps in the modeling, we recommend the use of Table 1, a dictionary of all of the symbols used in the present text.
Let the two variants of the order parameter ξ 1 and ξ 2 represent the generalized amplitudes of YU and YB, respectively. ξ 1 > 0, ξ 2 = 0 defines YU, and ξ 2 > 0, ξ 1 = 0 defines YB. Then, grasping behavior is determined by the time evolution of ξ 1 and ξ 2:
In Eqs. 1 and 2, we see that g is the coefficient that occurs in the mixed terms. Accordingly, g represents the strength of the interaction between YU and YB; the larger the interaction, the larger is the value of g.
In Eqs. 1 and 2, the terms λ 1 and λ 2 are “availability” parameters defining the possibilities, for the given circumstances, of YU and YB (Lopresti-Goodman et al., 2011), respectively, corresponding to ξ 1 and ξ 2. Paralleling Haken’s (1991) original conception of the λ parameter, a behavioral mode is available for λ > 0 and is not available for λ < 0. The magnitude of λ determines how strongly a mode is activated (it is a parameter that represents a growth rate). Although for λ > 0 a mode is available, the mode can be either stable or unstable. Only stable available modes are performed. In general, if λ 1 (or λ 2) is much larger than λ 2 (λ 1), then YU (or YB) is stable. For λ 1 = λ 2, both modes are stable. (For more in-depth discussions of the bistability domain, see Frank et al., 2009, and Lopresti-Goodman et al., 2011).
A linear relationship is assumed to exist between the availability parameters λ and the control parameter α (see Fig. 3 in Lopresti-Goodman et al., 2011):
In the GT model of Frank et al. (2009) and Lopresti-Goodman et al. (2011), the parameter L 1,0 is equal to unity and represents the initial value of the rescaled availability parameter (Lopresti-Goodman et al., 2011). In the present extension to accommodate negative hysteresis, L 1,0 can assume values other than 1. Given that the stability of YU or YB is primarily determined by the availability parameters λ 1 and λ 2, if an availability parameter is large, the corresponding Y is attractive—that is, there is a strong tendency to perform this Y. This relationship is demonstrated by Eqs. 3 and 4. According to Eq. 3, YU becomes less attractive as α increases, whereas Eq. 4 demonstrates that YB becomes more attractive as α increases. Therefore, at a critical control parameter value, we observe a transition from YU to YB. Since the underlying model exhibits a bistability domain, we can observe positive hysteresis, and the GT model in its original form can account for this, as previously demonstrated (Frank et al., 2009; Lopresti-Goodman et al., 2011). In Eqs. 3 and 4, the parameters L 1,0 and L 2,0 are constants. In general, they may be time-dependent.Footnote 6
Given that single-parameter bistable models cannot account for negative hysteresis (see Appx. A), we conjecture that the aforementioned negative autoregulation loop in Fig. 4a will be necessary to render the GT model adequate to address negative hysteresis in the perception of the affordance “graspable.” In adding negative autoregulation dynamics to the GT model, we will obtain a bistable model defined in more than a one-dimensional parameter space (as in Fig. 4a), and the modeling of negative hysteresis in the dynamics of the affordance “graspable” should be possible. It seems most promising for this negative autoregulation parameter to influence the strength of λ, which would render a behavioral mode less attractive with repetition. Specifically, it would render YU (in the case of O+) and YB (in the case of O−) less attractive with each subsequent presentation of X (wooden blocks). The foregoing hypothesis can be expanded: The effect of negative autocorrelation might depend on Y’s category, with verbal Y (e.g., uttering “two hands”) being more susceptible than nonverbal Y (grasping with two hands), because of verbal Y’s less elaborate cycle of information detection–information exploration. If selective verbal YB in O− were to become less attractive at a faster rate than selective verbal YU in O+, then the form of negative hysteresis should be the one manifested in the experiments of Richardson et al. (2007) and Lopresti-Goodman et al. (2009): The α value at which verbal YB transitions to verbal YU in O− is greater than the α value at which verbal YU transitions to verbal YB in O+ (see Fig. 1a).
In order to accommodate negative hysteresis, the revised GT model, GT2, would have to incorporate a negative autoregulation loop of the kind expressed in Fig. 4 (specifically, Fig. 4b). A first step would be to make the availability parameters L 1,0 and L 2,0 time-dependent (more exactly, trial-number-dependent). We can replace Eqs. 3 and 4 with
introducing time-dependent offsets rather than fixed offsets for λ 1 and λ 2. In Eq. 5, the variable n denotes the nth nonverbal Y or nth verbal Y in the X sequence. The offset variables L 1 and L 2 satisfy a deterministic, stable autoregressive model of order one:
with T > 1, which implies that they converge over a number of X–Y (i.e., situation–activity) pairs to the saturation values s 1 and s 2. The parameter T describes the characteristic time scale of the L 1 and L 2 dynamics. For T→1, the variables L 1 and L 2 quickly converge to the saturation values s 1 and s 2. The saturation values s 1 and s 2 basically correspond to the saturation values of the original GT model: L 1,0 (which was set equal to 1 in previous studies) and L 2,0. However, the active Y (the Y that is “on”) is penalized or inhibited, such that the saturation value of the corresponding offset availability is reduced by the amount of h, a time-dependent habituation parameter. We have, in consequence,
Equations 6 and 7 can be written in a more concise way by means of a variable transformation from L 1, L 2 to the mean L m = (L 1 + L 2)/2 and the difference ΔL = L 1 – L 2. From Eqs. 6 and 7, it follows that the mean corresponds to a constant for all times. From a detailed calculation, we obtain L m = (1 + L 2,0 – h)/2. The difference ΔL satisfies again an autoregressive model of order one, given by
where the (upper) minus sign holds if YU is “on” and the (lower) plus sign holds if YB is “on.” Moreover, we have ΔL 0 = L 1,0 – L 2,0 = 1 – L 2,0. We see that GT2—defined by Eqs. 1, 2, 5, 6, 7, and 8 or, equivalently, by Eqs. 1, 2, 5, 8, and 9, with L 1 = L m + ΔL/2 and L 2 = L m – ΔL/2—involves two control parameters, α and ΔL, that affect λ 1 and λ 2, which in turn determine the stability of the amplitudes of YU and YB, as shown in Fig. 4b. As defined above, the parameter ΔL is autoregulated, depending on which Y is active. A detailed calculation is given in Appendix B, and the results of the simulation shown in Fig. 8 confirm that the GT2 model can yield both negative and positive hysteresis.
Operationalizing bistability dominance versus negative autoregulation dominance
Note that for g > 1 and h = 0, the GT2 model reduces to the original GT model that explains positive hysteresis as the emergent feature of a bistable dynamical system. Moreover, for g = 1 the interaction between YU and YB as potential activities is minimal, and for that minimal interaction the bistability domain disappears in the original GT model. Consequently, we provide an operational understanding of bistability dominance as follows. The system (X◊Z) Y under manipulations of O (ascending or descending variations in X) is dominated by the bistability property if g ≠ 1 and h = 0, and by negative autoregulation if g = 1 and h ≠ 0. Since these two extreme cases are unlikely to be observed, the objective of our study will be to identify whether experimental data are more consistent with bistability dominance or negative autoregulation dominance.
In this context, it should be noted that the interpretation of the parameter L 2,0 is not affected by the generalization of the original GT model to the GT2 model. L 2,0 can be regarded as a measure of the strength of Y B, irrespective of α. If L 2,0 is positive and large, the overall “availability” or attractiveness (λ) of YB is large as well. In contrast, if L 2,0 assumes a small positive value or becomes negative, the overall “availability” or attractiveness of YB is relatively low (see Lopresti-Goodman et al., 2011, Fig. 4b). A related interpretation is that L 2,0 reflects the critical control parameter values at which bifurcations occur, averaged across O+ and O− (see Eq. C5). If L 2,0 is large, then critical values tend to be small, such that YB is preferred. In contrast, if L 2,0 is small, then critical values tend to be relatively large, indicating preference for YU.
Parameter estimation method
The predictions tested in the experiment below are in terms of the parameters of GT2—namely, g, h, and L 2,0. The typical experimental paradigm used to date to study (X◊Z)Y dynamics has focused on the determination of α c,1 and α c,2. In order to render the GT2 model in a form appropriate for conducting model-guided experiments, we needed to make two assumptions: Assumption 1 was the time-scale separation of (a) order parameter (ξ 1 and ξ 2) dynamics, (b) autoregulation, and (c) X (i.e., wooden plank) presentations. Assumption 2 was that negative autoregulation would have negligible impact in experimental conditions that would yield positive hysteresis.
To be consonant with GT2, the order parameter (ξ 1 and ξ 2) dynamics must be sufficiently fast to settle down to a fixed point (reflecting YU or YB) between two consecutive X conditions (specifically, consecutive presentations of wooden planks). If the dynamics of ξ 1 and ξ 2 are not sufficiently fast, then the participant would fail to respond to every presentation. Second, the autoregulation dynamics—when relevant to (X◊Z)Y dynamics—must be fast enough, such that the offset variables L 1 and L 2 converge to their saturation values before the control parameter α reaches the critical value at which the transition YU to YB, or the transition YB to YU, occurs. Otherwise, the negative autoregulation loop would not be able to unfold its full impact. Under these conditions, the critical values for α at which transitions occur would be independent of the precise value of T (see Appx. B). Since the focus of the present study was on the main phenomenon, there was no need to estimate the precise value of T. The remaining three parameters—h, g, and L 2,0—could be estimated on the basis of Assumption 2. The derivation is given in Appendix C, which identifies Eq. C2 (for h), Eq. C4 (for g), and Eq. C5 (for L 2,0) as estimators for the relevant model parameters.
Hypotheses and experiment
When considered in the framework of the GT2 model, the contrastive observations of Richardson et al. (2007) and Lopresti-Goodman et al. (2011) suggest the following two hypotheses, expressed in terms of the two order parameters, verbal Y and nonverbal Y.
-
(1)
That the (X◊Z)Y dynamics for Y as selective verbal activity should be dominated by negative autoregulation (h > 0 and g ≈ unity), and thereby exhibit negative hysteresis (α c,2 < α c,1).
-
(2)
That the (X◊Z)Y dynamics for Y as selective nonverbal activity should be dominated by bistability (h ≈ 0 and g > unity), and thereby exhibit moderate positive hysteresis (α c,2 > α c,1) or critical-point transition (α c,2 ≈ α c,1).
We conducted an experimental evaluation of the two hypotheses in a within-subjects design. The experiment was consonant in most features with the experiments of Richardson et al. (2007) and Lopresti-Goodman et al. (2011).
In addition to evaluating the relative significances of the parameters h and g via the two hypotheses, we expected the experiment to enhance understanding of the parameter L 2,0. In both the GT and GT2 models, L 2,0 is a measure of the availability (strength or attractiveness) of YB, irrespective of α. Given the perception–action distinctions between verbal Y and nonverbal Y (with action being performatory, or exploratory, or both), a difference in their respective L 2,0 values might be expected. Patently, verbalizing “two hands” and behaving so as to grasp with both hands rather than one do not have the same behavioral and physical entailments.
Method
Participants
A group of 32 participants (21 women, 11 men; mean hand span = 20.85 ± 1.71 cm) from the University of Connecticut participated in partial fulfillment of a course requirement. Thirty of these participants self-identified as being right-handed, and two self-identified as being left-handed. The university’s Institutional Review Board approved all procedures.
Materials
The stimulus set from Richardson et al. (2007) and Lopresti-Goodman et al. (2011) was used. It consisted of two sets of narrow wooden planks, 2 cm high and 6.5 cm wide, ranging in length from 4.5 to 24.5 cm, in 0.5-cm increments, and in weight from 22 to 135 g. All of the planks were painted black, with their ends painted red. The planks were kept occluded from the participants’ view until presented to them on a table that was 100 cm high. The surface of the table was covered in black felt.
Procedure
For both conditions and all sequences, participants were seated behind and slightly to the right or left of the presentation table, depending upon their handedness (see Fig. 5). Participants were positioned such that the shoulder of their dominant hand lined up with the midline of the table. Two spots on the table, 30 cm apart, were marked with labels reading “1” and “2.” For right-handed participants, Location 1 was the position on the left-hand side of the table and Location 2 the position on the right. The order was reversed for left-handed participants.

a For Y as selective nonverbal activity, participants were asked to grasp and move each object from Location 1 to Location 2 using either one or two hands. b For Y as verbal activity, they kept their hands at their sides and were asked to indicate verbally whether they would use one or two hands if they were going to grasp and move the objects from Location 1 to Location 2. They did not actually grasp the objects during this condition
Each of the 32 participants was tested with Y as selective nonverbal activity and Y as selective verbal activity. For each Y kind, each participant completed an O+ sequence and an O− sequence of plank presentations, separated by a random sequence, for a total of six sequences (or trials) per participant.
For Y as selective nonverbal activity, the seated participants were asked to comfortably grasp and move each object from Location 1 to Location 2. They were told that when engaged in the selective nonverbal Y, they were to grasp each plank lengthwise at the plank’s red ends using either one hand (YU) or two hands (YB).
To ensure that participants understood how the planks could be grasped, the experimenter demonstrated grasping the smallest plank in the set (4.5 cm) with one hand and grasping the largest plank in the set (24.5 cm) with two hands. Between plank presentations, the participants were instructed to keep their eyes closed and their hands on their laps. The purpose of these instructions was to eliminate the possibility that they would be influenced by the manner in which the experimenter grasped the objects to present them on the table. The experimenter, on placing a plank at Location 1, removed her hand and asked the participant to open his or her eyes and to grasp and move the plank. The participant, on placing the plank at Location 2, closed his or her eyes, removed the grasping hand, and awaited the presentation of the next plank. This process was repeated until the sequence ended. The process was the same for the O+, random, and O− sequences.
For Y as selective verbal activity, the seated participants were asked to indicate verbally how they would grasp and move each plank comfortably from Location 1 to Location 2, but they did not engage in any grasping behavior. For all plank presentations, each participant was asked to keep his or her hands on his or her lap and to keep eyes closed until the experimenter indicated when to open them. Once their eyes were open, participants indicated that they would use one hand to grasp the objects by saying “one” and indicated that they would use two hands by saying “two.” The directions as to how each plank would be grasped if they were to move the plank from Location 1 to Location 2 were the same as for Y as selective nonverbal activity. After making a verbal response for each plank, participants closed their eyes and waited for the presentation of the next plank. This process was repeated until the sequence ended and was the same for O+, random, and O− sequences.
The presentation sequence orders (O+ first or O− first) for both Y as selective nonverbal activity and Y as selective verbal activity were counterbalanced across participants, as was the order of the activity (selective nonverbal or selective verbal Y). On completion of the experiment, hand span was measured in centimeters.
Design and analysis
The experiment was based on a 2 (condition: nonverbal Y, verbal Y) × 3 (sequence: O+, random, O−) within-subjects design. The random sequence was used as a filler sequence only. With respect to Fig. 4b, the transition α c,2 from YU to YB within O+ sequences and the transition α c,1 from YB to YU within O− sequences were the π-numbers given for each participant by the respective transition plank length (in centimeters) divided by hand span (also in centimeters). The α c,1 and α c,2 values were then substituted into Eqs. C5, C4, and C2 to calculate the values of L 2,0, g, and h, respectively, for the two conditions.
Results
The Δα values for the two kinds of order parameter, verbal Y and nonverbal Y, were calculated and submitted to a univariate analysis of variance (ANOVA). The conditions were significantly different, F(1, 31) = 54.08, p < .001, η 2 = .64, with negative hysteresis occurring in the mean for verbal Y (M = –0.12 ± 0.10) and a critical point occurring in the mean for nonverbal Y (M = 0.01 ± 0.05).
The results for verbal Y were patterned in the manner of Fig. 1a. The response “two” (i.e., YB) occurred more often in O+ sequences, resulting in a smaller π-number for O+ (M = 0.57 ± 0.10) than for O− (M = 0.69 ± 0.14). A planned comparison paired-samples t test confirmed that the mean O+ π-number was significantly smaller than the mean O− π-number, t(31) = –6.79, p < .001. Nonverbal Y revealed no similar O-based difference (O+, M = 0.68 ± 0.08; O−, M = 0.67 ± 0.08), consonant with a critical-point transition (t < 1.0). Consideration of both Y kinds together revealed that only the O+ π-numbers differed significantly, t(31) = –7.97, p < .001 (O− π-numbers, t < 1.0).
Table 2 summarizes the individual transitions in the two Y conditions. Whereas the majority of participants (27/32) in the verbal Y condition exhibited one transition type (negative hysteresis), participants in the nonverbal Y condition exhibited all three transition types. A chi-square test confirmed the unequal frequencies of transition types for verbal Y, χ 2(2, N = 32) = 37.94, p < .001, with statistically more participants exhibiting negative hysteresis. For the nonverbal Y condition, the frequencies of transition types were equally distributed (p > .05).
Table 2 and the attendant analyses are consonant with Hypothesis 1, that the (X◊Z)Y dynamics for Y as selective verbal activity would exhibit negative hysteresis by virtue of prominent negative autoregulation. Hypothesis 2 contrasts with Hypothesis 1 in expecting that the (X◊Z)Y dynamics for Y as selective nonverbal activity would be dominated by bistability. The comparison of the two hypotheses is carried by the expected parameter values—h > 0 and g ≈ 1 for Hypothesis 1, versus h ≈ 0 and g > 1 for Hypothesis 2.
Minimally, analyses should find (a) h for nonverbal Y to be less than h for verbal Y, and (b) g for nonverbal Y to be greater than g for verbal Y. This minimal expectation was met. A repeated measures ANOVA revealed a significant difference between the h values for the two Y kinds, F(1, 31) = 51.41, p < .001, η 2 = .62, with h for nonverbal Y (M = .03 ± .02) being significantly less than h for verbal Y (M = .13 ± .08). Likewise, a separate repeated measures ANOVA revealed a significant difference between the g values for the two kinds of Y, F(1, 31) = 29.36, p < .001, η 2 = .89, with g for nonverbal Y (M = 1.15 ± 0.10) being significantly higher than g for verbal Y (M = 1.04 ± 0.08).
With respect to L 2,0, repeated measures ANOVA revealed that it was negative for both types of Y, but smaller for verbal Y (M = –0.34 ± 0.15) than for nonverbal Y (M = –0.25 ± 0.22), F(1, 31) = 10.67, p = .003, η 2 = .26. Of note, the present verbal-Y L 2,0 value matched the L 2,0 value (M = –0.36 ± 0.12) in the comparable circumstances of Lopresti-Goodman et al. (2011).
Discussion: the parameters and scope of GT2
The point of departure of the reported experiment was prior observations suggesting that for history O+ and history O−, the dynamics of (X◊Z)Y—synonymously, the dynamics of being “graspable”—underwent a discontinuous change at a critical value that depended on O and the form of Y. This discussion of the experiment’s results will focus first on the parameters of the GT2 model, and then on the GT2 model’s explanatory scope.
Parameter h
The experiment’s within-subjects design confirmed the prior contrasting observations of Richardson et al. (2007) and Lopresti-Goodman et al. (2011): Negative hysteresis dominated Y as selective verbal activity, but not Y as selective nonverbal activity. The induction of negative hysteresis in verbal Y was seemingly tied to an O+ π-number that was significantly smaller than the corresponding O− π-number (cf. Richardson et al., 2007) and significantly smaller than both the O+ and O− π-numbers for nonverbal Y. In the GT2 model, the location of the O+ π-number is determined by the degree of negative autoregulation, given by the parameter h. In accord with our expectation, h in the verbal Y condition was found to exceed h in the nonverbal Y condition.
In the GT2 model, the parameter h is the nonobvious control parameter that partners with the obvious control parameter α in producing negative hysteresis. As is made evident in Appendix A (specifically, Fig. 7), negative hysteresis cannot be exhibited by a dynamical system with a single control parameter. In GT2, as formulated above and in the appendices, the interpretation given to h is that it influences attractor (λ) strength, in the sense of rendering YU or YB less attractive with repetition. A conception of this kind is not unfamiliar in psychological theory. Its most well-known predecessor is Hull’s (1951) reactive inhibition theory (I R ), an inclination not to repeat a response R that is strengthened with each repetition of R. Assuming a similarity between h and I R provides additional hypotheses as to why verbal Y in the present experiment was associated with a larger h than nonverbal Y. For Hull, the less time between responses, the larger the accumulation of I R from response to response (accounting for poorer performance when trials are massed than when they are distributed). Perhaps the larger growth of h in the verbal Y trials of the present experiment can be viewed likewise: Verbal Y trials were shorter in duration and less temporally separate than nonverbal Y trials, given that the latter involved more components. (The temporal differences were seemingly the case, but trial durations and intertrial intervals were not recorded).
Parameter g
With regard to the g parameter indexing the strength of the interaction between YU and YB (the source of bistability), a larger magnitude was expected and found for nonverbal Y than for verbal Y. It is of note that the present g value for nonverbal Y (M = 1.15 ± 0.10) was less than the recalculated g value (using the GT2 model) for the comparable but nonidentical condition of Lopresti-Goodman et al. (2011) (M = 1.22 ± 0.13). Their condition (which involved walking to, picking up, carrying, and relocating the planks) entailed far more elaborate perception–exploration cycles (see Fig. 2) than was the case in the present experiment. The contrast in g values, suggestive of weaker bistability in the nonverbal Y condition of the present experiment, is consonant, therefore, with the hypothesized dependence of (X◊Z)Y dynamics on the opportunities within the experiment for detecting and tuning to exproprio- and proextero-specific information (Lee, 1978, 1980; Shaw, 2001) of special relevance to the experimental task (see note 4).
A similar understanding might apply to the observation in the present experiment of smaller g in the verbal Y than the nonverbal Y condition. Figure 5 makes transparent the difference in the perception–performance cycle: grasping and moving the plank in the case of nonverbal Y (grasping) but not of verbal Y (labeling). This invites understanding of the g difference in terms of perception and performance. Certain experimental results raise the possibility, however, that the weaker bistability of the verbal Y condition could be related to perception–exploration rather than to perception–performance. Mark et al. (1990) found that subtle restrictions of body movement induced by having the participant stand with his or her back pressed firmly against a wall led to impaired detection (assessed by verbal Y) of the boundary that marked the maximum height of a visible surface that afforded the act of sitting. When normal postural fluctuations during standing were allowed, selective verbal Y reflected maximum sitting capability accurately, a perceptual change that occurred without performing the activity of sitting. The experiments of Mark et al. (1990) and others (e.g., Oudejans et al., 1996) highlight the significance of an observer’s own movements and activities (however subtle) to the perception of action capabilities. They highlight the significance of the perception–exploration cycles nested within a cycle of perception and performance.
Parameter L 2,0
The results for L 2,0 revealed that the λ value, or the “availability,” of YB (i.e., the strength of YB as an attractor) was greater for nonverbal than for verbal Y, irrespective of α. Simplistically, relative to verbal YB, nonverbal YB is commonplace and natural as the behavior apposite to grasping an object with a width that exceeds hand span. This observation alone may be reason enough for the greater attractiveness of nonverbal YB. The basis of the nonverbal Y–verbal Y difference could, however, be more principled; it could be a matter of symmetry. Perhaps a formal argument could be made that the mutual compatibility of human and wooden plank on dimensions of relevance to grasping is higher than the mutual compatibility of human and wooden plank on dimensions of relevance to labeling.
GT2 model
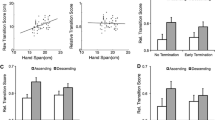
The GT2 model is not limited to reproducing the qualitative aspects of the present instance of negative hysteresis (see Fig. 8c); it can also reproduce the quantitative aspects. For selective verbal Y, the magnitude of h was 0.13. Simulation of the GT2 model using h = 0.13 yielded the results shown in Fig. 6. For O+ (top graphs in panels a and b of Fig. 6), the transition from YU to YB occurred at α c,2 = .57, consistent with the experimental data (see the Results above). As inspection of Fig. 6 reveals, L 1 (solid line) increases toward its saturation value of L 1,0 = 1, whereas L 2 (dashed line), decreases from L 2,0 to L 2,0 – h. For O− (bottom graphs in panels a and b), the transition from the two-hand to the one-hand grasping mode occurred at α = .69, consistent with the experimentally observed value (see the Results). As Fig. 6 shows, L 1 (solid line) decreases toward its saturation value, 1 – h, whereas L 2 (dashed line) increases and converges to its saturation value L 2,0. Panel C demonstrates the “round trip” in the two-dimensional parameter space, as constructed by means of the GT2 model from the experimentally observed data. In short, the GT2 model explains the experimental data (α = .57 for O+ and α = .69 for O−) in terms of the generic switching dynamics of negative-hysteretic systems. It should also be noted that because the GT2 model includes the original GT model as a special case, the GT2 model also accounts for positive hysteresis (as illustrated previously by Frank et al., 2009; Lopresti-Goodman et al., 2011). That is, the GT2 model replicates the experimental data for selective nonverbal Y (M = .68 for O+ and M = .67 for O−) as well as the experimental data for selective verbal Y.

Simulation results of the GT2 model, as in Fig. 8, but with parameters estimated from the data on selective verbal Y. The parameters are g = 1.04, L 2,0 = –0.25, h = 0.13, the T = 0.22 in units of α increments. From panels a and b, we can read off the critical values as α c,2 = .57 and α c,1 = .69 (for O+ and O−, respectively). They reproduce the experimentally observed values reported in the text. The loop-like trajectory shown in panel c exemplifies the loop trajectory depicted in Fig. 4b
Coda: organism–task–environment system and the dynamics of mutual compatibility
The type of modeling, the particulars of the methodology, and the affordance focus of the present article and its predecessor (Lopresti-Goodman et al., 2011) are in the spirit of two contemporary proposals. One is that perceiving, acting, and knowing emerge from the interplay of body, brain, and environmental surroundings (e.g., Calvo & Gomila, 2008; Clancey, 1997). The other is that this emergence is addressable through application of the tools of dynamical-systems theory, appropriately constrained by principles of self-organization (e.g., Beer, 1995a, b, 2009; Calvo & Gomila, 2008). The order revealed in the two studies, in terms of attractive and repulsive states and their transitions, is not that of body or brain, but of the organism–task–environment system.
With respect to the two proposals, Gibson (1979/1986) made a systematic argument for the organism–environment unit as the proper domain for theory and analysis, and gave short shrift to explanations in which processes sui generis (typically of a computational or neural nature) mediate an organism’s contact with its surroundings. Relatedly, for Järvilehto (1998) the recognition of organism and environment as a single system dictates explanations in terms of system reorganization (as opposed to a movement of the organism or an interaction of the organism and the environment), and the focusing of analyses on system outcomes or results (rather than on organism behavior or mental activity).
The present article can be viewed as an inquiry into the concept of the organism–task–environment system, an inquiry that has partaken of a schematic sharpening of the affordance notion (Shaw et al., 1982; Turvey & Shaw, 1979). This sharpening was achieved through the identification of four terms: a term X referring to an aspect of the surroundings, a term Z referring to an agent, a term (X◊Z)Y referring to the mutual compatibility between the preceding two terms with respect to a specific activity (or task) Y of the agent, and a term O referring to the occasion. The first three terms—X, Z, and (X◊Z)Y—are taken to be irreducible. The fourth term, O, is taken to be a partitioning on the setFootnote 7 of mutual compatibility relations (geometric and biodynamical; see H. J. Choi & Mark, 2004) expressed by (X◊Z)Y. The experimental investigation of discontinuous changes in the affordance “graspable” was identified accordingly as the investigation of the system (X◊Z)Y, specifically its transitions between YU and YB (unimanual and bimanual) as a function of different kinds of Y (nonverbal and verbal) and different forms of O (increasing X and decreasing X on a given dimension). According to the argument that the activities of organisms are primarily done with respect to affordances, the system (X◊Z)Y is the organism–task–environment system in so far as the concern is organism behavior.
In sum, the observations reported in the present article, both empirical and theoretical, suggest that the study of affordances—perforce, the study of the organism–task–environment system—can be usefully pursued as the study of (X◊Z)Y and its systematic transformations. That is, this study can be usefully pursued as the study of the dynamics of mutual compatibilities.
Notes
Minimally defined, a dynamical system is a system whose present states (or variables) depend entirely on its previous states (or values of its previous variables) in a lawful way; there are no fortuitous aspects. That is, a dynamical system is neither a fixed-construct system nor a “free-will” system. In a fixed-construct system, states do not evolve. In a “free-will” system, there are no lawful relations. Dynamical systems are expressed by difference equations (time advances in discrete steps) or by differential equations (time advances continuously). Random aspects—that is, variability—are also accommodated by dynamical systems in a lawful way by rendering the difference and differential equations as stochastic equations. In applications, dynamical-systems theory plays a significant role in addressing issues of system self-organization (e.g., disorder–order transitions) and system complexity.
Lee (1978, 1980) added exproprioperception to the classical exteroperception and proprioperception in order to give emphasis to information about the environment relative to the organism. He also intended the term to encompass information about the organism relative to the environment (personal communication from R. E. Shaw). On the grounds of group symmetry theory, Shaw (2001) has advanced exproprioperception (environment relative to body) and proexteroperception (body relative to environment) as distinct forms of information in Gibson’s (1979) specificational sense.
Time-dependent control parameters have been used to model oscillations in the perception of ambiguous or bistable images. Ditzinger and Haken (1989) introduced a time-dependent habituation parameter, h, that reflects the idea that the perception of a static display that is currently stable (attractive, in the sense of dynamical systems) will become less stable (less attractive) with increased viewing time. When the habituation parameter reaches a crucial value, rendering the currently perceived pattern no longer stable, a spontaneous transition to the other perception is exhibited. This habituation dynamic represents a negative autoregulation.
References
Beer, R. D. (1995a). Computational and dynamical languages for autonomous agents. In R. F. Port & T. van Gelder (Eds.), Mind as motion: Explorations in the dynamics of cognition (pp. 121–147). Cambridge, MA: MIT Press.
Beer, R. D. (1995b). A dynamical systems perspective on agent–environment interaction. Artificial Intelligence, 72, 173–215. doi:10.1016/0004-3702(94)00005-L
Beer, R. (2009). Beyond control: The dynamics of brain-body-environment interaction in motor systems. In D. Sternad (Ed.), Progress in motor control: A multidisciplinary perspective (pp. 7–24). New York, NY: Springer.
Calvo, P., & Gomila, A. (2008). Handbook of cognitive science: An embodied approach. Amsterdam, the Netherlands: Elsevier Science.
Case, P., Tuller, B., Ding, M., & Kelso, J. A. S. (1995). Evaluation of a dynamical model of speech perception. Perception & Psychophysics, 57, 977–988.
Cesari, P., & Newell, K. M. (1999). The scaling of human grip configurations. Journal of Experimental Psychology. Human Perception and Performance, 25, 927–935.
Cesari, P., & Newell, K. (2000). Body-scaled transitions in human grip. Journal of Experimental Psychology. Human Perception and Performance, 26, 1657–1668.
Cesari, P., & Newell, K. M. (2002). Scaling the components of prehension. Motor Control, 6, 347–365.
Chemero, A., & Turvey, M. T. (2007a). Complexity, hypersets, and the ecological approach to perception-action. Biological Theory, 2, 23–36.
Chemero, A., & Turvey, M. T. (2007b). Gibsonian affordances for roboticists. Adaptive Behavior, 15, 473–480.
Choi, H. J., & Mark, L. S. (2004). Scaling affordances for human reach actions. Human Movement Science, 23, 785–806.
Choi, S.-H., White, E., Wood, D. M., Dodson, T., Vasavada, K. V., & Vemuri, G. (1999). Delayed bifurcations and negative hysteresis in semiconductor lasers: The role of initial conditions. Optics Communications, 160, 261–267.
Clancey, W. J. (1997). Situated cognition: On human knowledge and computer representations. New York, NY: Cambridge University Press.
Ditzinger, T., & Haken, H. (1989). Oscillations in the perception of ambiguous patterns. Biological Cybernetics, 61, 279–287.
Fitzpatrick, P., Carello, C., Schmidt, R. C., & Corey, D. (1994). Haptic and visual perception of an affordance for upright posture. Ecological Psychology, 6, 265–287.
Frank, T. D., Richardson, M. J., Lopresti-Goodman, S. M., & Turvey, M. T. (2009). Order parameter dynamics of body-scaled hysteresis and mode transitions in grasping behavior. Journal of Biological Physics, 35, 127–147.
Garshelis, I. J., & Cuseo, J. M. (2009). “Negative” hysteresis in magnetoelastic torque transducers. IEEE Transactions on Magnetics, 45, 4471–4474. doi:10.1109/TMAG.2009.2021848
Gibson, J. J. (1966). The senses considered as perceptual systems. Boston, MA: Houghton Mifflin.
Gibson, J. J. (1979/1986). The ecological approach to visual perception. Mahwah, NJ: Erlbaum. Original work published 1979.
Haken, H. (1988). Nonequilibrium phase transitions in pattern recognition and associative memory. Zeitschrift für Physik B Condensed Matter, 70, 121–123.
Haken, H. (1991). Synergetic computers and cognition. Berlin, Germany: Springer.
Haken, H. (1996). Principles of brain functioning. Berlin, Germany: Springer.
Heft, H. (1993). A methodological note on overestimates of reaching distance: Distinguishing between perceptual and analytical judgments. Ecological Psychology, 5, 255–271.
Hirose, N., & Nishio, A. (2001). The process of adaptation to perceiving new action capabilities. Ecological Psychology, 13, 49–69.
Hull, C. L. (1951). Essentials of behavior. New Haven, CT: Yale University Press.
Järvilehto, T. (1998). The theory of the organism–environment system: I. Description of the theory. Integrative Physiological and Behavioral Science, 33, 321–334. doi:10.1007/BF02688700
Kelso, J. A. S. (1995). Dynamic patterns. Cambridge, MA: MIT Press.
Kochereshko, V. P., Prozina, G. R., Merkulov, I. A., Yakovlev, D. R., Landwehr, G., Ossau, W., et al. (1995). Inversion of magnetic hysteresis in semimagnetic superlattices. Journal of Experimental and Theoretical Physics Letters, 61, 396–399.
Lee, D. N. (1978). The functions of vision. In H. L. Pick & E. Saltzman (Eds.), Modes of perceiving and processing information (pp. 159–170). Hillsdale, NJ: Erlbaum.
Lee, D. N. (1980). The optic flow field: The foundation of vision. Philosophical Transactions of the Royal Society B, 290, 169–179.
Lopresti-Goodman, S. M., Richardson, M. J., Baron, R. M., Carello, C., & Marsh, K. L. (2009). Task constraints and affordance boundaries. Motor Control, 13, 69–83.
Lopresti-Goodman, S. M., Turvey, M. T., & Frank, T. D. (2011). Behavioral dynamics of the affordance “graspable”. Attention, Perception, & Psychophysics, 73, 1948–1965. doi:10.3758/s13414-011-0151-5
Lorente, P., & Davidenko, J. (1990). Hysteresis phenomena in excitable cardiac tissue. Annals of the New York Academy of Sciences, 591, 109–127.
Mark, L. S., Balliett, J. A., Craver, K. D., Douglas, S. D., & Fox, T. (1990). What an actor must do in order to perceive the affordance for sitting. Ecological Psychology, 2, 325–366. doi:10.1207/s15326969eco0204_2
Mark, L. S., Nemeth, K., Gardner, D., Dainoff, M. J., Paasche, J., Duffy, M., et al. (1997). Postural dynamics and the preferred critical boundary for visually guided reaching. Journal of Experimental Psychology. Human Perception and Performance, 23, 1365–1379.
Newell, K. M., McDonald, P. V., & Baillargeon, R. (1993). Body scale and infant grip configurations. Developmental Psychobiology, 26, 195–205.
Oudejans, R. D., Michaels, C. F., Bakker, F., & Dolné, M. A. (1996). The relevance of action in perceiving affordances: Perception of catchableness of fly balls. Journal of Experimental Psychology. Human Perception and Performance, 22, 879–891.
Petrusz, S., & Turvey, M. T. (2010). On the distinctive features of ecological laws. Ecological Psychology, 22, 44–68.
Pisarchik, A. N., Kuntsevich, B. F., Meucci, R., & Allaria, E. (2001). Negative hysteresis in a laser with modulated parameters. Optics Communications, 189, 313–319.
Pufall, P. B., & Dunbar, C. (1992). Perceiving whether or not the world affords stepping onto and over: A developmental study. Ecological Psychology, 4, 17–38.
Richardson, M. J., Marsh, K. L., & Baron, R. M. (2007). Judging and actualizing interpersonal and intrapersonal affordances. Journal of Experimental Psychology. Human Perception and Performance, 33, 845–859. doi:10.1037/0096-1523.33.4.845
Shaw, R. E. (2001). Processes, acts, and experiences: Three stances on the problem of intentionality. Ecological Psychology, 13, 275–314.
Shaw, R., Turvey, M. T., & Mace, W. (1982). Ecological psychology: The consequence of a commitment to realism. In W. Weimer & D. Palermo (Eds.), Cognition and the symbolic processes II (pp. 159–226). Hillsdale, NJ: Erlbaum.
Sivaprakasam, S., Narayana Rao, D., & Pandher, R. S. (2000). Demonstration of negative hysteresis in an injection-locked diode laser. Optics Communications, 176, 191–194.
Strogatz, S. H. (1994). Nonlinear dynamics and chaos: With applications to physics, biology, chemistry, and engineering. Reading, MA: Addison-Wesley.
Tuller, B., Case, P., Ding, M., & Kelso, J. A. (1994). The nonlinear dynamics of speech categorization. Journal of Experimental Psychology. Human Perception and Performance, 20, 3–16.
Turvey, M. T., Carello, C., & Kim, N.-G. (1990). Links between active perception and the control of action. In H. Haken & M. Stadler (Eds.), Synergetics of cognition (pp. 269–295). Berlin, Germany: Springer.
Turvey, M. T., & Shaw, R. (1979). The primacy of perceiving: An ecological reformulation of perception for understanding memory. In L.-G. Nilssen (Ed.), Perspectives on memory research: In honor of Uppsala University’s 500th anniversary (pp. 167–222). Hillsdale, NJ: Erlbaum.
van der Kamp, J., Savelsbergh, G. J. P., & Davis, W. E. (1998). Body-scaled ratio as a control parameter for prehension in 5- to 9-year-old children. Developmental Psychobiology, 33, 351–361.
van Rooij, I., Bongers, R. M., & Haselager, W. F. G. (2000). The dynamics of simple prediction: Judging reachability. In L. R. Gleitman & A. K. Joshi (Eds.), Proceedings of the 22nd Annual Conference of the Cognitive Science Society (pp. 535–540). Mahwah, NJ: Erlbaum.
Warren, W. H. (1984). Perceiving affordances: Visual guidance of stair climbing. Journal of Experimental Psychology. Human Perception and Performance, 10, 683–703. doi:10.1037/0096-1523.10.5.683
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix A: Single-control-parameter dynamics fail to explain negative hysteresis
Consider a dynamical system described by an N-dimensional vector and a vector-valued (i.e., N-dimensional) force F depending on the control parameter α. For example, the GT model is a special case for N = 2. Most importantly, the force field is uniquely defined for any parameter value α (e.g., it is impossible to have two different force fields for the same parameter value α). The model has two fixed points A and B, which may be stable or unstable. In order to see that such a model fails to account for negative hysteresis, it is useful to consider first the case of positive hysteresis (see Fig. 7a).

Modeling positive and negative hysteresis by means of dynamical systems depending on a single control parameter α. a Positive hysteresis is consistent with a dynamical system that exhibits a bistability domain. b Negative hysteresis results in a contradiction and cannot be explained in terms of a dynamical system changing its dynamical flow field only in response to the impact of a single control parameter α. A second control parameter is needed
Let us relate the model to a hypothetical experiment illustrated in the upper part of Fig. 7a. When increasing the control parameter α (arrow pointing toward the right), we observe that the fixed point A is stable for relatively small values of α and becomes unstable at a critical, relatively high value for α. Beyond that value A is unstable, but now B is stable. Decreasing α (arrow pointing toward the left), we observe that B is stable for relatively large values until α reaches a relatively low critical value. At that critical value B becomes unstable, but now A is stable for values smaller than that second (low) critical value. The observations made separately for scaling-up and scaling-down trials can be combined into a single model. Accordingly, the dynamic system is monostable (with fixed point A stable) for control parameters α smaller than the lower critical value, bistable (with both fixed points A and B stable) for values of α in-between the lower and higher critical values, and monostable again (with fixed point B stable) for α values larger than the higher critical α value (bottom part of Fig. 7a). The system exhibits hysteresis due to the existence of a bistable parameter domain.
Next, let us turn to a hypothetical experiment in which negative hysteresis is observed (Fig. 7b). Increasing α (arrow pointing toward the right), we observe that A becomes unstable at a low critical value. A is assumed to be unstable, and B is observed to be stable, for all α values larger than this critical α value. Scaling α down (arrow pointing toward the left), we observe that the fixed point B becomes unstable at a relatively high critical α value. B is assumed to be unstable, and A is observed to be stable, for all α values smaller than this critical value. We may attempt to combine these two observations into a single model (see bottom part of Fig. 7b). We see that this attempt results in a contradiction for α values that are between the two critical values: When negative hysteresis is observed, in a combined model the fixed points A and B are predicted to be stable as well as unstable at the same time. The force field F, however, is uniquely defined by α. Therefore, for any given parameter α the fixed points can be either stable or unstable. They cannot be both. Consequently, dynamical systems modeled with a single control parameter are inconsistent with the notion of negative hysteresis. The solution to this problem is to consider dynamical systems that feature a second control parameter.
Appendix B: Negative and positive hysteresis predicted by the GT2 model
Following Frank et al., (2009), we determined the critical values for α at which transitions occur from YU to YB, where Y is either selective nonverbal behavior or selective verbal behavior. In O+, we have ξ 1 in the “on” state and ξ 2 in the “off” state. Consequently, from Eq. 8 it follows that s 1 = 1 – h and s 2 = L 2,0. We assume that the dynamics of the offset variables are fast enough that they assume their stationary values close to a participant’s transition point. From Eqs. 5, 6, and 7, it then follows that λ 1 = 1 – h – α and λ 2 = L 2,0 + α. YU (nonverbal or verbal) becomes unstable at λ 2 = g · λ 1 (Frank et al., 2009). Solving λ 1 = 1 – h – α, λ 2 = L 2,0 + α, and λ 2 = g · λ 1 for α, we obtain the critical value α c,2 for O+ in the form
By analogy, for O− we obtain
Note that for h = 0, Eqs. B1 and B2 reduce to Eqs. 32 and 33 derived by Frank et al. (2009) for the GT model. Using Eqs. B1 and B2, we compute the signed hysteresis size Δα and obtain
which reduces to Eq. 13 of Frank et al. (2009) for h = 0. Inspection of Eq. B3 reveals that the GT2 model can account for both positive and negative hysteresis, as inspection of Fig. 8 affirms. The first term on the right-hand side of Eq. B3 is positive in any case (since L 2,0 ≥ –1 and g ≥ 1), and the second term is negative in any case (since g ≥ 1 and h ≥ 0). The sum of both terms may yield either a positive or negative result. Accordingly, as has been shown by Frank et al. (2009) and Lopresti-Goodman et al. (2011), the bistable character of the original GT model is indexed by the parameter g > 1 or log(g) > 0. Roughly speaking, the larger that log(g) is, the “wider” is the bistability domain (see Fig. 4a in Lopresti-Goodman et al., 2011). In particular, for g = 1 we have log(g) = 0, and the bistability domain disappears. In short, Eq. B3 and previous work tell us that the bistability property of the dynamical system contributes to the emergence of positive hysteresis. In contrast, from Eq. B3 it follows that the impact of the negative autoregulation loop quantified by the parameter h contributes toward the emergence of negative hysteresis.

Solutions of the GT2 model mimicking the behavior of a hypothetical participant whose performance exhibits negative hysteresis. Solutions were computed numerically from Eqs. 1, 2, 5, 6, 7, and 8 (The computation was done by means of the conventional Euler forward scheme for coupled first-order differential equations, single time step 0.1.). The control parameter α was increased from 0 to 1 (ascending condition) and subsequently decreased from 1 to 0 (descending condition) in steps (increments/decrements) of 0.01. For each given control parameter, the GT2 model was iterated until stationarity was reached. The parameters were g = 1, L 2,0 = 0.4, h = 0.2, and T = 0.22, in units of α increments (i.e., T = 0.22/0.01 = 22). a Order parameters ξ 1 (solid line) and ξ 2 (dashed line) for O+ (top) and O− as a function of α. The critical values are α c,2 = .2 and α c,1 = .4, leading to Δα = –.2. (b) Autoregulated dynamic offset variables L 1 (solid line) and L 2 (dashed line) of the availability parameters λ 1 and λ 2 for O+ (top) and O− (bottom) as a function of α. c Autoregulated pseudo-control parameter ΔL = L 1 – L 2 as a function of α. Graphically speaking, ΔL is the difference between the solid and dashed lines in the top and bottom subplots of panel b. The graph in panel c correspond qualitatively to the loop dynamics of the generic negative-hysteresis model shown in Fig. 4b
In closing this appendix, let us consider the special case g = 1, under which negative hysteresis for h > 0 occurs. For g = 1, the critical condition for the availability parameters λ 1 and λ 2 that correspond to transition points in the behavioral and judgment responses is λ 1 = λ 2. Substituting the values in Eq. 5 into λ 1 = λ 2 and solving for α, we obtain
Consequently, in the two-dimensional space spanned by α and ΔL, the bifurcation line is the line ΔL = 2α, shown as the line of open circles in Fig. 8c.
Appendix C: Details of the parameter estimation method
Let us reiterate the key argument made in the main text relevant for the derivation of model parameter estimators, which is Assumption 2 in the Parameter estimation method section. Accordingly, positive hysteresis is a phenomenon frequently found in the animate and inanimate world, and in general is due to a dynamic bistability of the system under consideration. Therefore, in the present study, we tentatively assumed that for positive hysteresis the contribution of the negative autoregulation could be neglected (i.e., h is almost equal to zero). In this case, we have g > 1 and h = 0, which implies Δα > 0, see Eq. B3. In a similar vein, in the present study we tentatively assumed that in the case of negative hysteresis, mode–mode interactions, as indexed by g > 1 are negligibly small because they can only act in the opposite direction of the desired effect (the first term in Eq. B3 is positive for g > 1). Consequently, if negative hysteresis is observed, we put g = 1 and h > 0, which implies indeed Δα = –h < 0, see Eq. B3. These considerations yield naïve estimators for g and h. Namely, for Δα > 0 we put h = 0 and estimate g using the estimator of the original GT model (this is Eq. 38 in Lopresti-Goodman et al., 2011). For Δα < 0, we put g = 1 and use h = –Δα. However, these estimators for g and h do not correspond to smooth functions in the two-dimensional space spanned by the variables α c,1 and α c,2 (i.e., they are not differentiable on the diagonal defined by α c,2 = α c,1, indicating Δα = 0). In particular, the naïve estimator of h reads
and exhibits a kink at Δα = 0. In order to eliminate this kink and to obtain a more physically plausible, smooth function, we replace Eq. (C1) by a smooth approximation of Eq. (C1). Note that there are infinitely many smooth approximations to Eq. (C1). They all will qualitatively yield the same result. We put
with
where B is the base of the logarithm and should be chosen to be a large positive number. The function f B is differentiable and for B→∞, the graph described by Eq. (C2) converges point-wise to the graph (with kink) defined by Eq. (C1). Substituting Eq. (C2) into Eq. (B3) and solving for g, we obtain
where α m = (α c,1 + α c,2)/2 denotes the mean critical α value. The offset saturation value L 2,0 is estimated as in the original GT model (see Lopresti-Goodman et al., 2011)
Eqs. (C2), (C4), and (C5) are the estimators for the model parameters h, g, and L 2,0. In all calculations, the parameter B = 109 was used.
In order to graphically illustrate the smooth estimators for g and h, it is useful to transform α c,1 and α c,2 into the variables of α m = (α c,1 + α c,2)/2 and Δα = α c,2 – α c,1—that is, the mean critical α value and the signed hysteresis size. Note that this is an invertible variable transformation because we have α c,1 = α m + Δα/2 and α c,2 = α m – Δα/2. The variable transformation is illustrated in Fig. 9(a). Figure 9(b) and (c) show how the estimated coupling parameter g and the negative autoregulation parameter h depend on hysteresis size Δα and mean α m.

Illustrations of g and h estimated from critical control parameter values α c,1 and α c,2. First, the two-dimensional space spanned by α c,1 and α c,2 is mapped to the two-dimensional space spanned by the mean critical value α m and hysteresis size Δα (see panel a). Second, g can be expressed in terms of α m and Δα, as shown in panel b. The surface is calculated from Eq. C4. Third, h can be expressed in terms of α m and Δα, as shown in panel c. The surface of h is calculated from Eqs. C2 and C4. The functions g and h are smooth functions of α m and Δα, and consequently represent smooth functions of α c,1 and α c,2
Rights and permissions
About this article
Cite this article
Lopresti-Goodman, S.M., Turvey, M.T. & Frank, T.D. Negative hysteresis in the behavioral dynamics of the affordance “graspable”. Atten Percept Psychophys 75, 1075–1091 (2013). https://doi.org/10.3758/s13414-013-0437-x
Published:
Issue Date:
DOI: https://doi.org/10.3758/s13414-013-0437-x